(报告出品方/作者:天风证券,潘暕、许俊峰)
1. 人形机器人元年或将开启,Mobile ALOHA+Isaac AMR 重塑 行业生态
人形机器人商业化元年或将到来,“AI+软硬件”供给准备充足。工信部印发的《人形机 器人创新发展指导意见》指出人形机器人有望成为继计算机、智能手机、新能源汽车后 的颠覆性产品;Markets and Markets 预计到 2027 年,全球人形机器人市场规模达 173 亿美元,复合增长率为 63.5%,市场发展广阔。为争夺这一迅速增长的市场,主要 厂商积极推进相关产品的迭代升级和量产落地,人形机器人的商业化条件已然具备。 核心技术瓶颈加快突破,AI 助力机器人具形化。长期困扰人形机器人智能控制升级发展 的主要有三个问题: (1)模仿学习能力:强调 AI 泛化能力,基于对于人类动作的模仿,人形机器人应具备 自主决策、自主学习升级的能力,提升任务完成的完整性和连贯性。 (2)末端执行能力:强调灵巧机器手的操作精度,在中央分析器“大脑”的运算决策下, 人形机器人的动作输出应精准、降低失误率,提升任务完成的正确性和准确性。 (3)基于感知的运动控制能力:强调底盘的全地形移动能力,类似自动驾驶,人形机器 人应基于对周围环境的感知实现对自身的运动控制,增强全移动操作能力,提升任务完 成的时效性。 Mobile ALOHA 系统和 Isaac AMR 平台分别针对软件算法和硬件开发提出解决方案, 攻克人形机器人三大难题,降本增效,加速人形机器人量产实现。

1.1. 斯坦福:Mobile ALOHA 助力人机协同训练,模仿学习取得重大突破
人形通用机器人元年或将开局,Mobile ALOHA 到来宣示 AI 赋能机器人迫在眉睫。 Mobile ALOHA 是基于 Transformer 端到端学习模型,通过 ACT 动作学习算法模仿人 类双手动作的远程操作系统,在已有的静态 ALOHA 数据集上,利用共同训练,助力机 器人完成需要精确操作的任务;达到人类模拟 50 次演示、机器人相同动作执行成功率超 过 80%的优良效果,而成本仅为同类系统的 10%-20%。 Mobile ALOHA 在做家务方面表现出较大的潜能,人形家务机器人雏型初现。近日,走 红全网的斯坦福炒菜机器人 Mobile ALOHA 展现出 AI 赋能下低成本实现机器人商业化 的可能。Mobile ALOHA 不仅可以自主操作,还可以支持全身远程操控完成洗衣、浇花、 煮咖啡等复杂任务,更可以通过神经网络自行学习双手操作的日常行为,充分完成做菜、 使用柜子存放物品、与人击掌等个性化的挑战任务,在家政领域方面潜能突出,或成为 人形机器人家用化的“拐点”。
我们认为,Mobile ALOHA 系统的优势在于共同训练和模仿学习,其将助力机器人在得 到人类演示的数据基础上,自主寻找不同任务的对应最优解,并在不同任务的执行中不 断提高操作的精准性与灵敏性,为人形机器人运用在更多场景上创造可能。人形机器人 可广泛应用于家政、工业、医疗等诸多行业,行业下的细分场景对机器人的需求往往会 存在差异。如要广泛适应不同场景,则会带来较高的研发成本,同时造成部分场景下功 能冗余、使用效率低。Mobile ALOHA 通过开源实现“完全复刻”,赋予使用者以低成 本在较短的时间内自由训练机器人,来满足个性化的需求,使得其应用空间更具想象力、 灵活性,为人形机器人量产使用做好准备。
1.1.1. 技术沿革:ACT 提升模仿学习能力,ALOHA 解决成本高昂问题
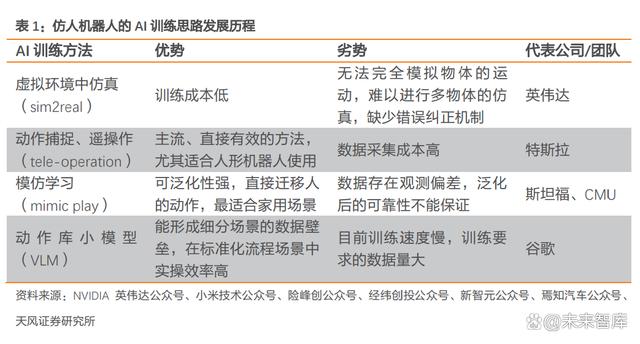
机械手臂的运动控制能力,是制约人形机器人普适性和灵活性发展的关键因素。这也是 Mobile ALOHA 开源项目的独特性和技术含量所在,利用直接的“模仿学习”方法,让 机器人“模仿”人类,低成本地解决操作训练和灵敏度问题,以 ALOHA 硬件的形式辅 助 AI 的协同训练与决策精准度。 机器人类人操作训练方法多样,模仿学习的性价比优势突出。模仿学习:即从人类提供 的演示中进行模仿学习,这种“行为克隆”可以让机器人学习各种原始的技能,从简单 的拾放操作,到更精细的操作等等,无需庞大数据库储备用于训练 AI 大模型,在训练成 本和训练周期上具有较大优势。
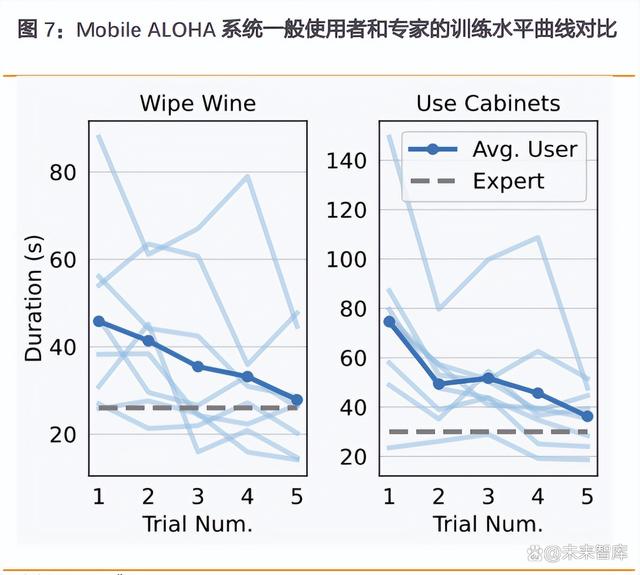
ACT 方法利用强化学习助力模仿学习简单化、易操作,增强机器人多场景应用性。 Mobile ALOHA 团队先期开发的 ACT(Action Chunking with Transformers)强化协 同学习与模仿学习的结合,通过训练直接映射人类动作的端到端模型,无需整体建模, 就可以训练人形机器人,使得普通人也可以在较短的时间内远程操纵 Mobile ALOHA 机器人完成未训练过的任务,并达到专家水平。
灵巧手以人手的结构和功能为模仿对象,在提升机器人柔性和易用性中发挥极为重要的 作用。灵巧手作为机器人的末端执行器之一,是机器人与环境相互作用的最后环节,其 性能的优劣在很大程度上决定了整个机器人的工作性能。目前由系统工程师、研发人员 针对具体应用进行的工艺分析、节拍分解、工位设计等复杂自动化系统的设计与集成, 机器人操作过程的编程与仿真等工作集中由多指灵巧手实现,将极大地简化系统复杂度 和设计难度。
ALOHA 机械臂系统实践软件性能,二指夹持更具稳定可靠。斯坦福 Mobile ALOHA 团 队基于 ACT 方法开发出硬件 ALOHA 机械臂,采用已有多轮技术验证的二指夹持器和连 杆传动方式,操作稳定性强、运动可靠性高。末端执行器上,外购 ViperX 6-DoF 机械 臂,在牺牲一定灵活性的基础上极大节约成本和便利维护,单价仅 5695.95 美元,实现 模块化组装、工作载荷 750 克、工作精度 5-8mm 等好处;传动方式上,采用传统的连 杆传动,由可调节的尼龙扣感知人手指的运动和动力,借由刚性连杆传递至机械两指, 结构设计紧凑,能实现抓取大型物体的功能;灵巧手上,选取可靠的二指夹持器,抓取 等运动稳定。
1.1.2. 团队构成:联手 Google DeepMind,软硬件开发能力强
谷歌 DeepMind 成员加盟,赋能团队机器学习更具前瞻性。斯坦福 Mobile ALOHA 团队 的两个项目共同负责人都同时在谷歌的核心人工智能研究部门——DeepMind 从事研究工 作,项目导师亦在谷歌另一核心人工智能研究部门——Google Brain(谷歌大脑)担任重 要研究岗位。DeepMind 致力于将机器学习和系统神经科学的最先进技术结合起来,建立 强大的通用学习算法。
SAC-X 调度辅助控制算法早已布局,助力 ALOHA 从零开始学会控制。早在 2018 年, DeepMind 提出了全新强化学习算法 Scheduled Auxiliary Control,通过学习范式克服传统 强化学习对任务相关知识的依赖,鼓励机器人主动调度,并在得到“奖励”后更有效地 自主探索其感应空间并设计解决方案。这一算法将帮助 ALOHA 基于静态数据集进行协同 训练的模仿学习,学会各种复杂的任务。
1.2. Mobile ALOHA:低成本人工智能机器人,新型算法助力高性价比
家庭保姆机器人的“原型机”,潜力广阔的 AI 自主模仿学习系统。Mobile ALOHA 系统 在团队论文中被定义为“一种用于收集双臂运动数据的低成本全身远程操作系统”,本 意是开发机器人双臂运动控制的廉价研究平台,但其恰好解决了家务机器人研发的两大 难题: 1)机器人的运动控制能力:主要是机械手臂的运动控制。Mobile ALOHA 团队利用“静 态数据集+模仿学习”联合训练的方法丰富机器人的运动执行样式、提升执行的准确性并 增强应对新任务的解决能力,同时开源式设计使得“人人可复刻”,使得普通人也可以 在短时间内具备熟练使用的能力。 2)机器人的移动能力:主要是机械底座的平稳移动。Mobile ALOHA 团队直接外购市场 上成熟的 AGV(智能搬运机器人)产品,得益于定位导航、路径规划等技术在上一个十 年的普及推广,采用的 AgileX Tracer AGV 有效地解决了机器人在家庭的灵活移动问题。
凸显模仿学习的应用潜力,避免“神话”大模型作用。Mobile ALOHA 系统以“模仿学习” 为核心,强调机器直接模仿人类的行为逻辑,降低编程要求,相比需要高算力、强算力 支撑的大模型,在训练成本上更具优势,以牺牲一定精准度为代价,简化学习流程、便 于普通人上手操作,助力家务机器人早日“走出实验室”。
1.2.1. 软件:协同训练与模仿学习方法兼容
感知能力与身体运动能力是通用机器人泛应用的突破口之一,需要打造人形机器人的 “小脑”。中国科学院院士、清华大学交叉信息研究院院长姚期智认为“人形机器人需 要有一个‘小脑’通过主导视觉、触觉等多种感知,来控制身体,完成复杂的任务”, Mobile ALOHA 团队致力通过协同训练与模仿学习方法打造灵活控制机械双臂的“小脑”。 “静态拆解+动态组合”的协同学习方式,增强机器人任务执行的完整性和连贯性。利用 协同训练使得机器人从完成静态固定、单一的任务到完成动态移动、连续的任务。已有 的静态 ALOHA 数据集含 825 个演示任务,包括拿起毛巾、拿起杯子、擦拭桌子、擦拭杯 子等日常家务操作,将静态数据连续组合便形成动态移动数据来完成整项任务,如完成 “清理洒在桌子上红酒”的任务:分解成“导航到水龙头,拿起毛巾,导航到桌子,一 只机械臂举起酒杯,另一只机械臂擦拭桌子和杯底”等步骤,循序渐进,帮助机器人在 已完成基础上逐步丰富任务的组合并提高任务的难度。
不同模仿学习方法兼容,助力机器人更好理解人类并模仿人类动作。Mobile ALOHA 团队 使用多种模仿学习方法与协同训练相结合:1)ACT,强化学习,帮助使用者在完成静态 ALOHA 数据集以外的任务时,可以通过人类先行使用机械臂示范,将人类动作转化为移 动数据,再运用于机械臂从零开始自主尝试,帮助机器人不断扩展使用场景;2)带分块 的 VINN,从具有最近邻居的演示数据集中检索动作,通过检索动作块而非单个动作,来 提升检索性能,防止过度拟合;3)扩散策略(Diffusion Policy),在生成高清晰度图像方面显示出卓越能力,得益于其在大规模图像-文本对上的预训练,帮助机器人只需要 20-50 个演示就能学会各种复杂的任务。三种策略方法兼容,既助力机器人提升理解力和 执行力,也帮助一般使用者快速上手,训练水准在短时间内接近专家水平。
1.2.2. 硬件:基于 Tracer 移动底座和 ALOHA 机械臂的全身远程操控系统
低成本实现高性能,在材料价格、操作功能、应用场景上实现完美平衡。Mobile ALOHA 系统以低成本为出发点,尽可能压缩全身操作系统和机械臂等关键部件的成本,并基于 底层算法的优势保持良好的性能发挥。硬件系统构成:1)移动底座——1 台 AGV 搬运机 器人;2)供电系统——1 块 1.26kW·h、14kg 重的电池;3)控制系统——1 台配备英伟 达 3070 显卡和英特尔 i7-12800H 的笔记本电脑;4)运动系统——2 对机械臂;5)视觉 系统——3 个分辨率为 480x640、频率为 50Hz 的摄像头。基本都通过采购市场上已有的 成熟产品,便于模块化组装和后期维修,部件的可靠性也经过了经验,保证整个系统的 运行稳定。
价值量最大的三个部分: 1)机械臂:采用智能佳 ViperX 系列机械手臂,配有 X 系列舵机智能伺服电机,能提供更 高的扭矩、更有效的散热和更好的耐用性,系统全开源,用户自由访问温度监控、位置 反馈、电压水平、负载和合规设置。 2)移动底座:采用 AgileX Tracer AGV(Tracer)运载机器人移动底盘,移动速度达到 1.6m/s,接近人类的平均步行速度;最大有效载荷为 100 千克,高度为 17 毫米;单价相 比同等速度和有效载荷的 Clearpath 的 AGV 便宜 5 倍多。 3)控制电脑:采用 Lambda Tensorbook 笔记本电脑,为深度学习公司 Lambda 和雷蛇合 作开发,专用于机器深度学习控制,使用了 64GB 的 DDR4-3200 RAM 和 2TB 的 PCIe 4.0 SSD 存储,采用 15.6 英寸屏幕,具有 165Hz 刷新率。
1.3. 灵巧机器手,国内外研究及应用加速增强机器人操作能力
机器人灵巧手作为一种新型的末端执行器,在机器人与环境的交互中起着关键作用。末 端执行器是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的 装置。灵巧手作为一种新型的末端执行器,预期可以实现的拟人化强力抓持、精准抓取 和灵活操作能力,具有日趋广泛的应用需求和市场前景。多指灵巧手的机构形式是多指 多关节,最普遍的是手指数目为 3~5 个,各手指具有 3 个关节,手指关节的运动副都是 采用转动副。目前各种协调控制、抓取规划方法被提出以用于控制多指灵巧手实现模拟 人手的抓取和操作。
国内外灵巧手研究不断发展,灵活性和感知能力大幅提高。国外研究始于 20 世纪 70 年, 历经了 50 多年的发展,从开始简单的机械手发展成现在的高科技人形仿生灵巧手。20 世 纪末,随着嵌入式硬件的发展,多指灵巧手的研究向着高系统集成度和丰富的感知能力 提升的方向发展,进入了快速发展阶段。20 世纪 80 年代后期,国内一些机器人研究机构 和部分高等院校也相继开展了机器人多指灵巧手的研究工作。高度系统集成的灵巧手具 有灵活性和功能性的优势,但是复杂的系统导致了高额的制造成本并且降低了系统的可 靠性和易维护性。因此,近 10 年,多指灵巧手设计的一个重要方向是简化系统、提高鲁 棒性,使其受到干扰仍能保持原有状态。 已实现部分量产,国内产品更具性价比优势。目前已有多家公司制造出商品化的机器人 多指灵巧手,其销售价格普遍居高。Shadow dexterous hand 是英国 Shadow Robot 公司 推出的先进仿人型机器人手,拥有 24 个自由度和 20 个可单独控制的自由度,并且可配 备指端触觉传感器,是目前最成熟的商品化多指灵巧手之一,报价约 30 万美元。哈尔滨 工业大学-德国宇航中心合作开发的 HIT/DLR 灵巧手售价在 90 万元人民币以上,德国 SCHUNK 公司的 SVH 五指手报价 70 万元人民币以上。因时机器人是国内首家实现仿人五 指灵巧手商业化落地的企业,也是国内首家可以实现灵巧手量产并将价格降到万元级别 水平的企业,其仿人五指灵巧手单手有 6 个自由度,12 个运动关节,基本能够完成人手 70%以上的抓取动作,有益于人形机器人低成本量产实现。
灵巧手的发展稳步增长趋势明显,市场需求进一步助推研发。依据仿生学对生物机体环 境适应性强、效能高、结构合理等特点进行模拟及研究,灵巧手会越来越接近人手。在 航空航天、医疗健康、科学研究等领域,灵巧手的发展将逐步取代人手进行一系列的活 动,完成更加精细和危险系数更高的操作。作为机器人与环境相互作用的末端执行机构, 灵巧手的研究及发展将继续成为未来机器人领域的研究热点,从而更好助力人形机器人 应用于多领域多场景。
1.4. 英伟达:Isaac AMR 平台,虚拟环境仿真高效率提升机器人移动能力
基于感知的运动控制能力是人形机器人的重要基础,Isaac AMR 平台加速机器人的部署 效率。英伟达发布的可供第三方进行二次开发的全新自主移动机器人平台 Isaac AMR (Autonomous Mobile Robot),可用于模拟、验证、部署、优化与管理自主移动机器人, 包含了边缘到云的软件服务、计算能力以及一套参考传感器和机器人硬件,可加快 AMR 的开发和部署速度,减少成本和缩短产品上市时间。 虚拟环境算法加速机器人感知能力提升,集成式设计便于机器人大规模生产。软件层面, 与斯坦福 Mobile ALOHA 团队采用低成本的“模仿学习”方法训练机器人操作能力不同的 是,英伟达团队基于 Isaac Sim 创造“逼真的数字孪生”便于 AMR 机器人的设计,Isaac AMR 加快全自主移动机器人的部署并降低成本;硬件层面,采用模块化设计集成 Nova Orin,便于研发人员评估系统并改进。
(一)软件层面
Isaac 平台将机器人开发分割为训练、仿真测试、构建、部署四个步骤,并融入多项先进 技术提升开发、应用效率: 训练:通过 Isaac Replicator 生成的合成数据进行增强,并使用 NVIDIA TAO 工具包进行 训练。 仿真测试:利用本地和云端提供 NVIDIA Isaac Sim 创建物理精准的逼真环境,对机器人运 行相关的各方面进行测试。 构建:使用硬件加速 SDK(如提供给 ROS 用户的 Isaac ROS GEM、用于视频流解析的 NVIDIA Deep Stream SDK、用于自然语言处理的 NVIDIA Riva)将 AI 带入到基于嵌入式系 统 NVIDIA Jetson 的机器人。 部署:通过 EGX Fleet Command 和 Isaac for AMR(包括 Metropolis、cuOpt 和 DeepMap 等)管理机器人编队以优化生产力。
我们认为,Isaac 平台为 AMR 开发带来的主要边际变化在于仿真,一方面通过光线追踪 等先进技术提升仿真感知的能力,另一方面通过应用 USD 格式解决仿真环节中面临的兼 容问题。在部署环节,Isaac 平台通过多种功能强大的软件包或平台进一步缩短 AMR 部署 所需时间,并强化环境感知、定位和导航等关键能力。 我们认为,Isaac Sim 和功能强大的各种硬件加速 SDK 相结合,可以帮助用户更有效率地 解决机器人开发面临的长尾问题。移动机器人广泛应用于工业、仓储物流、医疗等诸多 行业,行业下的细分场景之间对机器人的需求往往会存在差异。以锂电池生产为例,由 于应用环境以及具体任务不同,前段工序对机器人运行精度要求非常高,后段工序则需 要更好的温度适应性。我们认为大量具备差异化需求的细分场景意味着高昂的机器人研 发成本,通过在虚拟环境中进行开发、验证和优化,减少开发成本与开发时间,一款功 能完善的仿真器可以帮助 AMR 机器人应用于更多细分场景。
(二)硬件层面
Nova Orin 平台集成多种高性能硬件,为 AMR 提供了传感器+算力一体化的通用范式。 我们认为,AMR 的许多应用场景中存在定制化的需求,例如动力电池生产领域对机器人 温度适应性要求较高。该通用范式将降低硬件开发门槛,助力开发者将更多资源用于针 对性提升服务效率与质量,实现差异化发展。
1.4.1. 仿真环节:Isaac Sim 提升仿真感知能力,USD 解决系统兼容问题
Isaac Sim 较大提升了仿真感知的能力,能够更真实地模拟 AMR 自主导航等操作。我们 认为,Isaac Sim 为 AMR 产业带来的主要边际变化之一在于提升了对机器人及环境的图形 渲染能力,一个重要的应用就是可以更快速、准确地模拟视觉传感器。
视觉传感器是实现视觉 SLAM 的关键硬件,而由于图形渲染能力不足,Gazebo 等主流仿 真系统只具备在简单场景下仿真视觉传感器的功能,一旦场景复杂程度提升,仿真运行 速度会急剧降低。视觉传感器仿真的难点在于:1)对图形渲染能力要求较高,且需要同 时对多台相机进行渲染;2)需要整合 GPU 资源,快速解算真实物理模型并同步渲染相机 图像和其他传感器信息。
基于 RTX 平台,Isaac Sim 可以实时渲染来自传感器的符合物理学的数据。在使用 RTX 模拟激光雷达时,光线追踪可以在各种照明条件下或者在对反射材料做出反应时提供更 加准确的传感器数据;平台还提供许多新的可模拟 3D 资产包括仓库零件、机器人等,用 于建立符合物理学的模拟环境,帮助开发者和用户可以快速开始构建机器人训练虚拟仿 真环境。 英伟达 RTX 平台主要包含先进的光线追踪技术以及 DLSS(深度学习超级采样)技术, 这些技术为 Isaac Sim 的图形渲染能力提供了强有力的支撑。传统的光栅化渲染在呈现设 计细节、光影效果逼真、暗部区域表现、反射真实上略显不足;光线追踪技术基于图层 进行渲染,一次性处理全局光线,光线可以找到与它相交的一切,因此很容易实现反射、 间接光照等全局的照明效果,真实性更强。英伟达在 2018 年首次推出了可以商用的光线 追踪技术,其主要竞争对手 AMD 在 2020 年才开始应用该技术。 英伟达在 2018 年也推出了 DLSS 技术,该技术可以在不影响画质和响应速度的前提下, 利用 AI 创造更多高质量帧。其原理是通过机器学习的方式,以海量游戏中的 16K 超高分 辨率图像作为参考标准进行学习,让 AI 可以根据有限的画面数据合成出一帧符合目标显 示分辨率的画面。光线追踪技术可以提供更真实的光线和图像,而 DLSS 可以利用 AI 创 造高质量帧,两者结合让 RTX 实现强大的图形渲染能力。
USD(通用场景描述)提升仿真系统兼容性,优化机器人开发环境。机器人仿真过程往 往需要构建不同的环境、导入不同的机器人进行测试,不同环境的软件使用可能冲突。 例如 ROS 开发团队提出的 urdf(Unified Robot Description Format)不能表示除了刚体系 统之外的复杂场景,Gazebo 的开发团队提出 SDF(Simulation Description Format)来表 示机器人之外 z 的环境,但由于 ROS 和 Gazebo 始终由开源社区开发运营,缺乏良好的 项目组织管理机制,逐渐出现多个版本并存、语法互相冲突等问题,限制其进一步发展。 所以机器人仿真器需要提供一种通用的机器人和场景描述文件。 英伟达将 USD 应用于机器人仿真,与其他格式相比,USD 的强大之处在于其复用以及兼 容能力。一方面,该格式是一个开放、可扩展的框架和生态系统,具有可用于在 3D 虚拟 世界中合成、编辑、查询、渲染、协作和仿真的 API,支持在场景创建和资产聚合中实现 非破坏性工作流和协作,以便团队可以协同迭代;另一方面,USD 与文件系统无关,提 供可扩展的资产解析器来支持不同数据源的任何数据存储模型。我们认为 USD 有助于降 低机器人仿真描述文件之间的兼容问题,由于研发人员将可以自由使用并切换各类仿真、 设计软件,AMR 的开发效率或将进一步提升。
1.4.2. 部署环节:Isaac 平台强化路径规划等关键技术,缩短 AMR 部署时间
AMR 的一个技术瓶颈在于,如何在有人工和其他车辆(如人工叉车)出入的场景,以及 一些需要灵活变化的复杂环境中,使整个系统运行保持高效率。未来,移动机器人需要与人共事,具有自主规划路径的能力,需要在能够自动避障绕行的情况下仍然实现系统 的优化调度。这要求调度管理系统能够平衡单体、群体两种智能能力,而机器人本身也 需要具备灵活的调整能力。 英伟达通过 cuOpt 和 DeepMap 等软件(平台)提升 AMR 路径规划效率、缩短机器人 部署时间。 (1) cuOpt 是打破世界纪录的加速优化引擎。它使用 AI 帮助开发者设计复杂、实时车队 路线规划方案,可用于解决具有多种限制的复杂路线问题,并提供动态路线、作业调度、 器人仿真,以及亚秒级求解器响应时间等功能。cuOpt 主要有四大优势: a)性能强劲:在 10 秒内为 1000 个包裹规划行驶路线,在精度相同的环境下比传统 方案快 120 倍。 b)扩展性强:最多可以横向扩展到 1000 个节点,以完成任务量繁重场景中的计算。 NVIDIA cuOpt 的性能优于最先进的解决方案,以解决当今无法实现的创新用例。 c)准确度高:在 Gehring&Homberger 基准测试中以 2.98%的误差实现世界纪录 的准确性。 d)降本增效:可通过动态改道减少 15%的行驶时间和燃料成本。
(2) DeepMap 在部署 AMR 时可以访问 NVIDIA Deep Map 平台基于云的 SDK,从而 将机器人构建大型设施地图的速度从数周缩短到几天,精确度达到厘米级。借助 DeepMap Update Client,还可实时更新机器人地图。 (3) Metropolis 是一个图形处理分析平台,可以通过 DeepStream、TAO 等强大工具将 工厂中的大量摄像机等传感器数据转化为有价值的见解。开发者可以直接使用英伟达提 供的上百种预训练模型,也可以借助 TAO 工具套件构建定制化的视觉 AI 模型,并通过 DeepStream 在边缘部署,从而加快整体开发速度并实现更出色的实时性能。在 AMR 的应用中,Metropolis 帮助 AMR 在工厂车间获得额外的情境感知层,从而避开拥挤的 区域和盲区,并增强对人员和其他 AMR 的可见性。
1.4.3. Nova Orin 硬件平台提供通用范式,强劲算力保障 AMR 应用可靠性
英伟达 Nova Orin 平台为 AMR 提供传感器与算力一体化服务,集成多种高性能硬件,如 同 Isaac AMR 的“大脑”和“眼睛”。Nova Orin 可以为机器人制造商提供工业化配置, 减少工程设计资源占用,提高 AMR 构建、部署可靠性,降低开发成本。 Nova Orin 提供通用范式,助力 AMR 行业差异化发展。AMR 目前主要应用于工业领域, 我们认为,该领域的特点在于各个细分行业之间差异化程度大,壁垒较高。以锂电行业为 例,在动力电池生产的后段工序中会涉及高低温测试的环节,厂商需针对移动机器人的温度适应性进行优化;而在锂电前段生产工序中,AMR 主要用于为生产线自动运输和对接物 料,对移动机器人的需求以高精度举升型为主。Nova Orin 平台提供了传感器+算力的通用 范式,使 AMR 企业能集中精力利用自身对行业的深刻认知,针对不同行业特性对产品进 一步优化。
AMR 定位导航使用同时定位与建图技术(SLAM),可以依靠传感器可实现机器的自主定 位、建图、路径规划等功能。根据传感器不同,SLAM 主要分为激光 SLAM 和视觉 SLAM 两种技术路线。 激光和视觉路线都存在自身局限,多传感器结合是未来发展的趋势。激光 SLAM 依赖激 光雷达作为感知设备,构建的地图精度更高,但单机价格高昂且可靠性不足。激光 SLAM 的定位方式基于轮廓匹配,无法有效解决高度动态的场景变化带来的影响,在特定环境 下容易丢失定位。视觉 SLAM 依赖计算机视觉作为感知手段,能够获得环境的视觉语义 理解,在此基础上能够在复杂动态的环境中实现灵活避障、准确定位和高效路径规划, 但自身技术成熟度不足、依赖光线且对算力要求高。多种传感器结合可以弥补单一传感 器自身存在的缺陷,是未来发展的趋势。
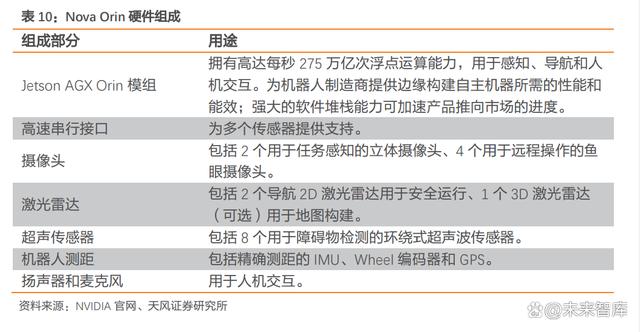
多传感器融合的技术难点主要在于信息冗余和算力不足。如何让 AMR 在短时间内根据来 自多种传感器的大量信息做出正确决策,并满足引入视觉 SLAM 所带来的更高算力需求, 是融合多种传感器的 AMR 厂商面临的主要问题。 英伟达通过提高硬件算力解决了多传感器融合面临的传统问题,并通过软件进一步保障 AMR 定位建图的可靠性。英伟达 Nova Orin 平台同时搭载了 3 个激光雷达和 6 个摄像头, 同时还包含 8 个超声波传感器用于检测障碍物,2 个 IMU 传感器用于测距,拥有完整的 360 度传感覆盖范围,传感器的多样性和冗余性可以实现 Isaac 平台中的最新功能并延长 运行时间。英伟达在 Nova Orin 平台中搭载 Jetson AGX Orin 模组,可以提供高达请务必阅读正文之后的信息披露和免责申明 22 275TOPS 的 AI 性能,我们认为该模组在保障视觉传感器等部件需求的同时,可以为 AI 处 理信息、做出决策进行充分的算力支持。
1.4.4. 对动态、复杂环境适应能力远超 AGV,AMR 具备更广阔的应用前景
AMR(自主移动机器人)与传统 AGV 方案相比智能程度更高,更能适应环境高度动态、 复杂的场景,在 Isaac 平台软硬件双重赋能的背景下,AMR 具备更广阔的应用前景。 AMR 基于 SLAM 技术,可以即时定位并在现场构建地图,能够实现柔性部署。同时, 由于 AMR 具备自主避障的能力,部署时不需要预设标识规划路线导航,进一步降低部署 成本并且可以适应环境动态、复杂的场景。 1)动态场景下即改即用:现代制造场景往往是高度动态的,经常需要对产品或产品线进 行修改。当需要移动生产单元或添加了新的单元或流程时,更改 AGV 部署时间久、成本 高。AMR 可以在现场映射新的地图,从而立即实施新的任务,帮助客户优化生产。 2)复杂环境下自主越障:人员流动会使移动场景更加复杂。AGV 在遇到障碍物时无法 绕行,导致在人员密集的场景中容易引起堵塞。AMR 基于多种传感器以及算法,可以分 辨障碍物并根据其类别设计绕行路线,从而提升复杂场景下的运行效率。 以 TCL 和灵动科技合作的仓储物流平台为例,该平台主要有以下痛点:1)移动机器人 部署改变频繁。由于仓库地点较为分散,且电子产品市场需求变化快、更新换代频繁, 对移动机器人的灵活度要求更高。2)环境复杂。工人搬运和自动化设备搬运两种形式同 时存在,若移动机器人没有避障功能,物流搬运过程中会出现断流甚至堵塞的情况。且 仓库并非简单的点对点传输,涉及多节点交接转送,特别容易出错。灵动科技使用 AMR 产品切入,利用 AMR 柔性部署以及自主避障的特性解决平台痛点,提高了经营效率。
2. 人工智能成为产业胜负手,核心互联网及工业企业重点布局
AI 之战打响,核心大企业抓紧布局。ChatGPT 等大模型广泛受到关注,AI 热潮席卷全球, 展示出 AI 技术与传统产业相结合所爆发出的生命力和活力,使得利用人工智能转型升级 发展模式成为公司的未来生存之道。为追赶时代潮流,世界 500 强等核心大企业加大布 局力度,争先开发新技术,用 AI 改进企业运营模式。 传统业务数字化转型,与 AI 应对新业务挑战同步进行。世界 500 强企业不断将核心业务 与 AI 相结合,新旧互补创造出新的生产力,据 Morning Consult 调查显示,2022 年全球 企业 AI 采用率达到 35%;同时应对新业务的扩展,持续横向开发新 AI 产品使用场景,凭 借自身资金优势和技术积累,主动建立 AI 研发及应用公司生态,打造可持续发展及新的 盈利增长点。
2.1. 微软:建立 AI Lab, 将新 AI 技术融入原有软件、硬件及应用生态
微软期待用 AI 重新定义软件开发与工作的未来。微软与 OpenAI 合作,将其大语言模型 ChatGPT 和 GPT-4 等集成到 Azure 平台上,为开发者提供便捷的 AI 应用开发和部署服务。 微软还推出了一系列 AI“集合”——涵盖从 Azure OpenAI、Copilot Stack、开发工具到 协作应用等领域,微软将 AI 融入现有的软件和服务生态,从提供 AI 工具到构筑 AI 平台 和生态,全方位帮助开发者应对技术革命,予力人们运用 AI,让每个人都可以在工作和 生活中,探索全新机遇与无限可能。
2.1.1. AI 人工鼻子:具有气味识别和感知能力的人工智能机器人
基于神经网络将气体浓度与气味类别相关联,利用 AI 智能识别不同的味道。AI 人工鼻子, 是使用气体传感器和微控制器来检测空气中气味的智能设备。当这些鼻子连接到物联网 平台时,可用于多种场景,如它可以帮助制作一个实时警报系统,用于食物何时变质, 或用于检测空气中的特定气体。
工作原理:气体传感器测量物质发出的各种气体的浓度,由人工智能模型提取这些气体 的关键特征,并用它们来推断相应的气味。推断的结果会显示给用户,也可发送到 Azure IoT 进行进一步分析(例如发送警报),或有助于更新和改进模型。气体传感器可以检测 周围空气中的一些气体(如一氧化碳,二氧化氮,乙醇,挥发性有机化合物)的浓度, 微控制器用于读取和收集气体传感器数据,并将其输入到 AI 模型中。通过训练神经网络 模型,来提取每种气味的“嗅觉指纹”,即其构成气体的最小,最大和平均浓度等特征, 进而建立气体浓度和气味类别之间的关系。最后将训练好的神经网络部署回微控制器, 完成人工鼻子的构建。
应用领域:能够嗅觉的智能设备可以应用于多种行业,如建筑维护行业可以用人工鼻子 来判断办公室或浴室何时需要清洁;化妆品行业可以用人工鼻子来替换香水中的成分, 使其更环保,同时保持相同的香气;或者可以在家里用人工鼻子来烘焙,判断食品是否 变质、气味是否一致等。
2.1.2. AI AirSim 无人机: 具有“自定义视觉模型”和“独立识别环境能力”的无人机
基于微软原有的 Azure IoT Edge 的优势,提升无人机视觉和图像识别分析能力。AI AirSim 提供了一个高效、灵活、可扩展的平台,在火灾或地震搜救期间,通过收集地面 图像并在电脑上 3D 建模,根据不同的搜救需求定制视觉模型,并将其部署到无人机等边 缘设备上,可以实现实时的图像分析和反馈。 使用 AirSim 创建 3D 生成的环境,训练无人机视觉感知功能。AirSim 可以提供一个逼真, 高质量,高性能的 3D 生成的环境,可以用于训练和测试视觉模型,而无需在真实环境中 进行大量的数据采集和标注。 使用 Azure IoT Edge 部署和管理视觉模型,增强无人机图像实时处理能力。Azure IoT Edge 可以让用户将云端的智能功能和分析能力部署到边缘设备上,例如无人机,摄像头, 传感器等。并可以让用户在云端创建和管理边缘设备的模块,包括视觉模型,然后将其 推送到边缘设备上,实现实时的数据处理和反馈。 应用场景众多,具有开拓新场景的潜力: (1) 搜索和救援:用于创建真实环境的 3D 版本来处理自定义视觉模型,无人机拍摄照片 并通过自定义视觉模型查找图像中的物体或人类。 (2) 识别动物:用于训练模型识别动物,当成功识别时,发送警报给 Azure IoT Hub。
2.2. IBM:利用 AI 研发高效的机器人流程自动化平台
IBM 相继发布红帽 OpenShift 开放式混合云技术平台、新一代 AI 与数据平台 IBM watsonx,积极在 AI 领域布局,助力政府和企业实现快速、高效、安全地实现数字化转 型;并注意制定正确的护栏以确保 AI 系统中的数据质量、合规性和透明度,引导企业有 效运行 AI,以合乎道德标准的方式快速获益。
2.2.1. IBM RPA 融合 AI,实现高效数字化
打造全球领先的企业级 RPA 机器人,增强机器人主动模仿学习的能力。RPA(Robotic Process Automation,机器人流程自动化)通过复制、模仿人们日常工作中存在高度重复 的操作行为,从而使计算机能够自动化完成这一部分工作。IBM RPA 集成了先进的人工 智能,具备顶级的智能度和敏捷度。通过自动化从简单的后台任务到更复杂的业务流程 来提高公司的投资回报率,RPA 能在提升效率和生产力的同时,助力公司数字化转型。
工作原理:RPA 利用软件机器人,自动执行高度重复任务,将企业员工从中解放出来。 软件机器人利用图形用户界面(GUI)而非传统的系统 API,与系统交互,模仿员工操作, 大幅缩短价值实现的时间,减少成本和人工错误,并增加吞吐量。该“软件机器人”在 执行低技能活动时尤为有用,比如:在多个系统之间传输数据;从电子邮件和文档中提 取数据等。 AI 支持:AI 驱动的 RPA 能够基于人工智能的见解完成任务,无滞后时间;结合 RPA 和 API,通过 IBM Watsonx 创建编排自定义技能,为 AI 自动化提供灵活性,同时根据特定 需求培训 Watsonx,使自动化更加定制化;通过 AI 的数据分析能力,IBM RPA 能够提供 更深入的业务洞察和流程优化建议,使得自动化过程更加高效,改善客户体验。
2.2.2. AI 赋能 Spot,打造新一代安防巡检机器人
AI 读取分析热图像,助力 Spot 机器人增强热成像和视觉能力。结合人工智能、遥感和边 缘计算的力量,IBM 正在与美国国家电网和波士顿动力公司合作,改变自动监控设施安全 问题的方式,并融合 AI 与机器人技术到波士顿动力公司的 Spot 机器人中,使得机器人能 够读取模拟仪表并解释热图像以发现问题。
边缘计算加快决策,实现远程监控。在大流行和 IBM 的方案利用边缘计算进行现场数据 处理,减少数据移动和存储成本,加快决策过程。此外,运用 OOD(Out-of-Distribution Detection)系统,提高 AI 模型的训练质量和准确性,以及应对环境和条件的变化。 新版本的 Spot 增加热成像仪,支持多区域监测。在检查审查中,用户能够查看和比较整个照片的温度,为两个地区之间的差异和温度设置警报。IBM 与 Spot 的集成解决方案能 够即时检测并通知工作人员,以纠正潜在的问题,这种端到端的解决方案体现 AI 在实时 监测和响应中的作用;此外,Spot 机器人具有漫游探测功能,能用来获取对业务运营至 关重要的数据。
2.3. Amazon:已部署超 75 万个仓库机器人,实现系统化人机协作
亚马逊采用 AI 技术驱动机器人,用于自动化的仓库操作和物流处理。如 Sparrow、 Cardinal、Proteus 等仓库机器人,亚马逊通过引入红杉(Sequoia)和 Digit 两种新的机 器人系统,结合 AI 技术和高级机械设计,提升机器人的移动速度和工作效率。 亚马逊的 AI 应用优势显著: (1) 快速送货服务:AI 技术使亚马逊能够更快地处理和执行客户订单,处理所需时间减少 了 25%。 (2) 交付估计的准确性:通过 AI 驱动的系统,亚马逊提高了交付估计的准确性,增强了客 户信任和满意度。 (3) 员工与机器人的协同:目前有超过 75 万个机器人在亚马逊与人类员工协同工作,通 常被用来承担“高度重复的任务”,减轻人类员工的压力,提升整体工作效率。
2.3.1. 红杉(Sequoia)系统:自动化集成机器人系统,大幅提升包裹递送效率
红杉(Sequoia)系统是亚马逊推出的一种新型机器人系统 (一款嵌入式 AGV),它将超 过 75 万个仓库机器人组合在一起,形成了一条用于包裹递送的机器人流水线。其工作流 程是:运输移动机器人将集装箱化的库存货物直接运输到龙门,龙门是一个带有平台支 持设备的高大框架,龙门同时提供手提袋给人类员工,人类员工用手提袋在龙门拣选客 户订购的货物。 核心优势: (1) 智能处理与识别:完成订单所需的时间缩短,物品识别和存储速度提高。 (2) 自动化集成系统:红杉将 AI 与移动机器人、龙门架系统、机械臂和人体工程学工作站 结合,实现高效的库存管理。 (3) 高度协作性设计:机器人设计强调与员工的协作性,提高了工作站的人体工程学标准, 并通过 AI 技术优化人机交互,员工将不再需要经常把手举过头顶或蹲下来取客户订单, 有助于降低人类的受伤风险。
2.3.2. Digit 人形机器人:拟人化设计,有望真正替代人类工作
亚马逊正在测试 Digit 人形机器人,其具备类似人类的移动、抓取和处理物品的能力。亚 马逊正致力于将更高级的 AI 技术应用于自动化中,以提升工作效率。 创新设计: (1) 腿部移动机制:Digit 使用两条腿行走,而非传统的轮子,这使它能够在需要上下移动 的台阶和楼梯等复杂环境中有效移动。 (2) 手臂设计:配备可以拿起和移动包裹、容器、客户订单和物品的手臂。
2.4. 日立集团:加速迭代,利用 AI 推动传统铁路建设与智慧医疗创新
日立基于搭载 AI 及 IoT 技术的智能 OT 研发控制系统,在数字解决方案、自动控制架构、 电机驱动与电子电力方面开创新格局。将 AI 与核心业务相结合,研发解决复杂社会课题 的数字解决方案和高度可靠性、安全性的自动控制技术,低碳排放的电气化产品,如运 用 AI 与 IoT 分析收集的传感数据,开发高效的运行维护方案,维护铁路设备、加快制药 进程等。同时,日立加快自研自有生成式人工智能(AI)产品,开拓 AI 产品运用的更多 场景。
2.4.1. AI 铁轨检测:利用 AI 捕捉和重现不同时间段的轨道图像,高效检查异常情况
利用元宇宙和 AI 技术,革新铁路维护和设计的方式。Hitachi Rail 通过使用前置摄像头捕 捉轨道图像,由 AI 算法比较不同时间的图像,高效检测异常情况。并通过拍摄,将这些 异常情况重现于元宇宙中,轨道会用不同的颜色标记,绿色表示正常,红色表示需要维 护的区域。由此,工程师可以快速识别哪些轨道需要注意或维护,加速诊断和修复的过 程。此外,元宇宙和 AI 技术还可以作为有价值的教育和培训工具,让工人获得处理各种 难以在真实世界模拟的异常情况和问题的实践经验。 高效帮助设计列车和寻找新的解决方案。借助 AI 技术,Hitachi Rail 的工程师可以在元宇 宙里自由设计列车,如改变座椅的颜色来调整车厢的氛围,在决定内部设计时可以提供 有益参考;或移除座椅,暴露出车辆的框架,检查列车结构并进行修整设计。 工作过程: (1) 数据收集阶段:列车在正常行驶时,利用前置摄像头拍摄轨道的图像。 (2) 异常检测阶段:AI 算法将这些图像与后续行驶中拍摄的图像进行比较,以检测异常, 例如轨道部件的腐蚀或损坏。 (3) 元宇宙再现阶段:拍摄到的异常情况将在元宇宙中重现,轨道被分为不同的颜色:绿色表示系统处于正常状态,红色表示需要维修的异常区域,引导工程师做出正确高效的 维修决策。
2.4.2. AI 制药:AI 深度学习提升制药效率,可预测药物效果
加快生物标志物的筛选,助力精准制药。日立集团在制药过程中创新使用 AI 深度学习技 术,可以直接在从临床试验等中获取的医疗数据中,准确地检测出可预测药物效果的定 式化指标作为生物标志物候选,并提供给客户。研发药企就可以不需要花费时间进行统 计处理和探索生物标志物候选,而可以集中精力进行医学/药理学的验证和考察。同时, 该服务还可以实现患者分层,即根据生物标志物将患者分为不同的组别,为每组选择合 适的治疗方法,提升药物研发的靶向性和准确性。 高效率突出,识别功能强大。AI 制药技术可以从人体基因和电子病历等信息中提取与药 物作用有关的因素,并使用这些因素构建简便的数学公式来生成指示药物作用的指标。 这种方法不仅可以使人类从医学和药理学角度判断生物标志物候选的有效性,而且可以 在数据样本少而因素多的情况下,快速、准确地检测生物标志物候选。另外,该方法还 可以自动发现多种因素计算得到的医学指标,如 BMI、肌酐清除率等,在制药研究领域发 挥革命性的提升作用。
2.5. 松下:领先布局智能家居与智能制造,AI 相机加速占领 B 端市场
松下成立人工智能研究中心,重点发力于 AI 机器人、智能家居设备和工业自动化。并将 AI 技术与其电子产品相结合,开发 AI 产品在家用电器、住房、汽车等领域的使用场景。i-PRO 嵌入式人工智能安防摄像头:AI 引擎深度学习能力强大,可精准检测、识别与判 断图像。通过使用深度学习的分析技术和安全技术,在摄像机内部集成强大的 AI 引擎, i-PRO 网络摄像机可以直接运行深度学习应用程序,无需额外的服务器进行分析计算,从 而保持高水平的准确性和效率,研究领域涉及图像识别、数据分析、智能机器人等分类 场景。
使用场景广泛,支持个性化定制。AI 摄像头,可以提供高精度的人类搜索、车辆搜索、 占用检测等功能。此外,i-PRO 可以满足不同客户的需求,提供从中端到高端的各种型号, 以及可定制的特殊型号。
2.6. 瑞士 ABB:协作能力领先,提供智能应用机器人
ABB的机器人,在协作机器人、机器学习和人工智能等领域能力先进突出。ABB专门为电力、自动化、机器人和电气化等行业提供 AI 技术和工程解决方案,累计交付超过 50 万 套机器人解决方案,机器人研发、量产及应用经验丰富,在工业生产中使用场景众多。
2.6.1. AI 拾取机器人:高精度自动抓取
基于人工智能提升机器人拾取精度。ABB拾取机器人,可以在仓库和物流中心的非结构 化环境中准确地检测和拾取物品,利用先进的 AI 视觉系统,实现超过 99.5%运行时间下的 高精度拣选工作,能够识别和处理各种形状和尺寸的物品。AI 机器人可自动确定每个物 品的最佳抓取点,并通过吸力抓取器完成拾取和放置,无需人工监督。
衍生型号众多,广泛适用于不同场景运用。拾取机器人可安装在 ABB三款机器人 IRB1200、IRB 1300 和 IRB 2600 上。该拾取器的有效载荷高达 3 公斤,伸出距离可达 1.65 米,具有灵活性,以满足订单履行和分拣的许多不同需求;ABB还提供一整套服务,包 括服务协议、在线培训、预防性维护和技术在线支持,帮助客户在不同场景下高效使用 机器人。
2.6.2. AI 优化电池储能系统:AI 预测提高运行能力
AI 决策电池储能的最佳运行途径,提高电池寿命和投资回报。电池储能系统(BESS)是 将能量储存在电池中以备日后使用的设备(或该设备的集合)的通用行业名称,包括电 池、电池管理系统、逆变器、开关设备、变压器以及控制和保护系统。ABBBESS 与可再 生能源整合在高峰生产期间储存能量,以及在需要时提供所存储的能量。该系统的数字 启用版本配备了能源管理系统(EMS)以及监测和诊断系统,通过本地部署、云端解决方 案提供,利用 AI 实时判断能量的储存或者释放。
ABB将人工智能融入电池储能系统带来了以下提升: (1) 运行效率提升:AI 在电池储能系统中扮演着至关重要的角色,通过收集和分析大量数 据,预测未来 24 小时能耗,优化电池运行。 (2) 准确能源预测:AI 能生成包含季节性变化和天气因素的精确能源消耗预测,有助于平 衡电池储能系统的能源供需,提升整个系统的效率和可靠性。 (3) 电池寿命管理:AI 的应用还包括分析电池运行数据来预测其寿命,并优化存储容量。 通过识别不同的老化机制,AI 能延长电池寿命,减少维护成本,提高系统的整体可持续 性。 (4) 模块化 AI 设计:AI 的模块化设计适应不同电池储能应用,灵活调整操作参数,便于 根据需求进行定制和升级,以确保最佳性能。 (5) 投资回报的增长:通过提高电池系统的效率和性能,AI 显著提升了储能投资的回报率。 这有助于投资者更有效地支持未来能源需求,实现更高的投资回报。
2.7. 西门子:专注工业人工智能开发,基于物联网的应用领域广泛
工业人工智能的先驱和领导者,AI 应用场景众多。西门子基于自研云基础物联网操作系 统 MindSphere,通过将 AI 技术固化为应用程序形式,为发电、能源管理、智慧城市和医 疗领域等方面的客户提供降本增效的智能解决方案。同时注重 AI 技术的前沿专利布局, 西门子在 AI 技术的专利申请方面 2018 年排名全球第十一、欧洲第一。
2.7.1. ACUSON Sequoia 超声系统:利用 AI 优化软件组织架构,提升成像质量
BioAcoustic 生物声学成像技术平台革命性提升超声成像质量。ACUSON Sequoia 超声系 统能够不断利用 CPU(中央处理器)、FPU(浮点计算单元)、GPU(图形处理单元)的 优势来进行独立分区计算处理,从根本上解决生物学差异问题,获取超高水准图像质量, 带来“经典时代”的图像及技术的革命性突破。 AI 组织架构系统软件,提高图像信噪比。系统从提高超声信号,低噪声和数字无线电频率模拟,强大的计算机处理和图形设计模式,人工智能化软件的组织架构,和先进的传 输模式多方位多维度入手研究,使得超声图像拥有极高的信噪比,减少传统的波束形成 的局限性。
2.7.2. SIEPA-工厂预测维护系统:集成 AI 与大数据,准确预测设备故障及维护需求
利用机器学习算法分析数据,模型自我学习持续提升预测精度。西门子的智能预测维护 系统 SiePA 减少了设备的非计划性停机时间,提高了生产效率。AI 的应用确保了故障预 测的准确性和故障处理的及时性。 两条运行思路,针对不同场景灵活切换:(1) AI 驱动的故障预测:集成先进的 AI 算法和 大数据分析设备的实时运行数据和海量传感器输入,从复杂的数据中识别出潜在的故障 模式和异常行为,实现对未来故障风险的准确预测;通过持续学习和模型优化,系统能 够不断提高其预测的准确性,从而实现更高效的预防性维护。(2) AI 辅助的故障诊断:在 预测到潜在故障后,AI 系统利用自然语言处理(NLP)和知识图谱技术,从历史故障数据 中提取有用信息,帮助快速准确地诊断当前问题并推荐有效的解决方案,显著提高故障 处理的效率和准确性。
2.8. 软银:创造高度拟人化机器人,支持二次开发和互动未来
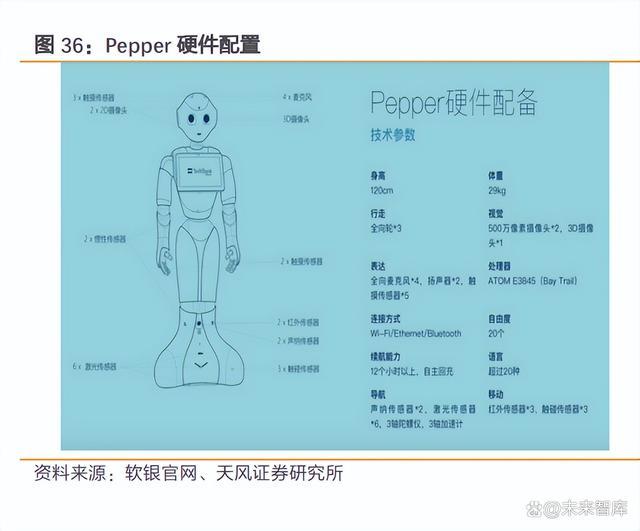
高度拟人化的机器人平台,增强人机交互体验。软银的 Pepper 机器人通过其独特的肢体 语言和表情系统,能够轻松地与人类进行交流并产生共鸣。在应用领域上,Pepper 广泛 应用于商业和教育环境,如零售、金融、公共服务等多个行业,并具有更多开发新场景 使用的优势: (1)操作系统的兼容性:采用 NAOqi 2.9 操作系统,允许第三方集成服务。该系统基于 Android 平台开发允许开发者轻松集成多种第三方 AI 服务,如讯飞的语音识别和语义理 解、微软的人脸识别技术、自定义人脸识别引擎、SLAM 建图和导航技术、ArUco 视觉库 定位和导航等。 (2)人工智能与交互技术:具有人脸识别、情感分析和自主移动的能力。Pepper 机器 人利用先进的 AI 技术可以自行识别人脸数据,并根据人的面部动作从事情感分析,能通 过 SLAM 技术进行空间定位和导航,提供更加自然的人机交互体验。 (3)全传感器硬件配置:Pepper 头部配备有丰富的传感器,含触摸传感器、麦克风、多 个摄像头、眼部和耳部 LEDs 以及扬声器等,加强与用户的交互能力;移动底盘含有 6 个 激光传感器和 3 个触碰传感器,可用于室内环境的精确扫描和导航。 (4)编程环境开放:支持多种编程语言,含 C++、Python、JavaScript 和 LabVIEW 等, 适合不同开发者的需要。Pepper 采用图形化编程工具 Choregraphe,由软银独创,使得 编程过程更加直观易用,并内置 RoboWizard 应用提供了基于语音交互的多功能操作界面, 如基础语音聊天、舞蹈、拍照、应用启动,便于使用者自由编程定义机器人功能。
3. 初创团队引领下游硬件多点开花,重量级硬件应用涌现可期
“AI+”成为新兴产业的催化剂,初创团队创造新兴产品蕴含较多可能。将 AI 与传统产 品相结合,将提供相对差异化的使用体验,深受消费者欢迎,成为未来市场主要竞争点, AI 运用有望成为各厂商开发亮眼新功能、争夺市场份额的核心战略手段。跟随这一潮流, 我们选取了一些在智能机器人、智能生活、智能家居、3D 打印及智能办公等领域具有一 定应用前景的全新产品,其初创团队瞄准差异化竞争赛道,蕴含着较多的投资机会。
以下四大领域涌现出一批特色 AI 下游硬件应用: (1)多功能机器人:机器人智能化、自动化发展加快,自主决策与学习能力大幅提升, 可在复杂情景中处理更丰富的事务,应用空间充满想象,如具有情感分析和表达功能的 家养宠物机器人 MOFLIN、增添生活乐趣。 (2)智能消费电子:AI 赋能日常使用的电子设备,人工智能改善产品的体验感、多样化 功能,可满足消费者日益增长的个性化需求,如具有全面辅助摄影功能的智能相机助手 Arsenal 2、帮助新手快速成长为大师。 (3)智能家居:人工智能助力传统家居实现互联化、全场景链接,切实改善用户居住生 活环境,丰家居富生活模式,如智能 AI“私人教练”Vi、在家实时体验个性化的专业健 身指导。 (4)AI 推动生产力进步:在 3D 打印领域,“AI+3D 打印”激发出更多创新力,提升 3D 打印成品的完整性和精细性;在智能办公领域,人工智能改变传统办公方式,更好适应 线上化、远程化办公趋势发展、显著提升工作效率,如基于 ChatGPT 驱动的 AI 语音记录 器 PLAUD NOTE、可自动全程整理会议纪要。 AI 普惠化浪潮席卷,更多企业参与竞争。ChatGPT 代表的以大模型为主的生成式 AI 技术 突破,使得 AI 与 PC 结合成为可能,降低了个人或小企业使用大模型智能算力的门槛, 充分释放 AI 开发新产品潜力,有望出现更多 AI 产品,使得“一切皆有可能”。我们认为, 伴随着开发准入的普惠化,未来有望创造出更多颠覆性的 AI 下游应用产品,彻底革新人 类生活与工作方式,并改变行业竞争生态。
3.1. 智能新纪元:多功能机器人领航未来科技
3.1.1. Heisenberg H1:带人工智能视觉功能的多合一机器人“割草机”
Heisenberg H1 Pro 的突破性更新包括了 Heisenberg Pilot System (HPS),它利用机器人视 觉、双人工智能芯片和深度学习算法,为整片草地创建 3D 导航,实现完美的边缘和均匀 的修剪。 Heisenberg H1 核心功能: (1) Heisenberg H1 Pro 使用由机器人视觉驱动的 3D 导航系统,因此它能看到每一个凹凸, 记住每一个边缘,并实时避开物体。结合使用摄像头、强大的板载处理和深度学习算法, 可以高效地在院子里(包括人行道和车道)进行导航,并不断读取地形,快速了解需要避开的地方。可以识别从动物到草坪椅等各种类型的物体,然后利用其人工智能驱动的 系统进行导航。无论物体是移动还是静止, H1 Pro 都能智能识别。 (2) 独特的一体化模块化设计:可全方位护理草坪。可以随时调整切割高度,或设置 Heisenberg H1 Pro 的禁区。 (3) HPS 精确的边缘识别功能:H1 Pro 使用虚拟边界,结合 Vision AI 和 GPS,能够自动 创建无周长地图,规划出最佳的割草路径。
3.1.2. Scout:家用微型 AI 自主移动机器人
Scout 是一个机器人开发平台,它的机器人控制层是开放源代码的,允许开发人员编写 C/C++ 程序,以实现更多功能,包括与其他 AR 游戏的接口。 Scout 体积微小,却拥有 强大的智能能力,它是世界上第一个由人工智能驱动的自主家用机器人,可以全天候自 主巡逻使用者的家。 1.AI 学习与手动控制:家庭监控无盲点。借助人工智能驱动的 SLAM(同步定位和绘图), Scout 可以全天自主巡逻和守护使用者的财产,并提供状态报告。Scout 基于 Linux + ROS 运行。它能利用谷歌的 TensorFlow 识别人体、宠物等物体。它还运行单目 SLAM 算法, 以实现自主巡逻并找到自己的充电端口,然后回到充电座上充电,为下一次任务做好准备。 2.STEM 编程教育:Scout 不仅仅是一个有趣的可编程机器人,它还具有高度可定制性。 它为教育工作者、学生、技术爱好者和其他任何准备将其提升到新水平的人开辟了一个 充满可能性的世界。Scout 支持 Scratch 语言,可用于编程附加功能和学习简单的编程技能,以促进 STEM 教育。高级开发人员可以在 Scout 上执行 C/C++ 程序。更多的扩展工 具可以设计为机器人的附加技能。
3.多功能智能家居机器人:Scout 是一款智能机器人,兼容亚马逊 Alexa 和谷歌 Home, 能够传输视觉信息至屏幕设备,并通过声控操作与智能家居设备协作。具备运动检测和 声控录音功能,Scout 可在充电站待命。它支持通过 iOS 和 Android 应用进行远程视频监 控、Wi-Fi 连接、巡逻路径定制,以及在侦测到人或宠物时发出警报。采用单目 SLAM 技 术和音视觉智能,Scout 能识别和跟踪人宠,提供远程宠物监控和双向音频交互。具备 1080P FHD 摄像头、夜视功能、Mecanum 轮和 IPX 65 防护,可灵活应对各种环境。其小 巧设计(70 毫米×100 毫米×110 毫米)适合家庭、办公室或企业使用,轻松进入狭窄空 间。 4.隐私保护:Scout 提供端到端加密和点对点连接的流媒体视频,支持双重身份验证以增 强安全性。作为物联网设备,用户可在应用中禁用麦克风和摄像头,而且摄像头还配备 了物理遮盖。
3.1.3. MOFLIN:具有情感功能的人工智能宠物机器人
MOFLIN 是一款全新概念的人工智能宠物。它拥有情感能力,能像有生命的动物一样进化; 它有着温暖柔软的皮毛、可爱的声音和动作;它适用于所有需要慰藉与疗愈的日常场景。 开发者从大自然中汲取灵感,开发了一种独特的算法,使 MOFLIN 能够通过不断的互动 来确定学习模式,并通过传感器评估周围环境,从而学习和成长。MOFLIN 也会持续学习, 以回应和表达自己的情感。MOFLIN 旨在提供情感安慰的服务,在人们的日常生活中进行 互动。
工作原理:MOFLIN 通过其内部情绪图谱发展和表达自己的情绪,并通过传感器创建一种 分析其环境变化的算法,从而使其更接近于一种有生命的动物。MOFLIN 将通过可爱的声 音和执行器实现的动作来表现自己的情绪。它们的个性将取决于环境和主人对它们的态 度。因此,它将不断进化,形成自己独特的个性。 别出心裁的充电设计:当 MOFLIN 需要充电时,需要将其放入一个类似鸟巢的无线充电 装置中,就会开始充电,充满电后会自动停止。在 MOFLIN 充电和睡觉的过程中,它还 会发出可爱的声音和细微的反应,就像真正睡觉的动物一样。
产品理念:希望应用各种 ICT 技术设计出的 MOFLIN 成为真实、可爱的个人伴侣。
3.1.4. SMOROBOT :100% 无绳人工智能泳池清洁机器人
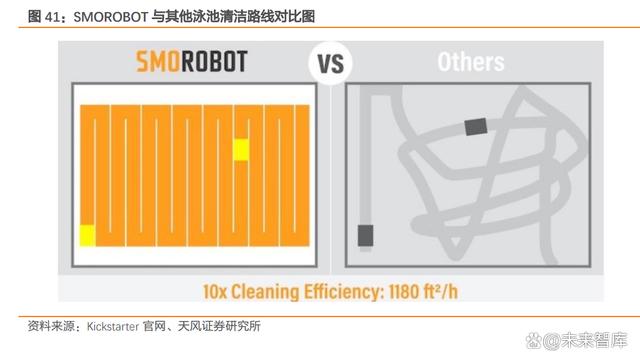
SMOROBOT 开发了一种独特的运动控制系统,结合智能路径规划技术,可以从边缘到边 缘清洁整个泳池,包括池壁和水线。此外,SMOROBOT 完全是无绳的,其强大的电池一 次充电可使用 3.5 个小时,是一款自动化遗忘的机器人帮手。 技术亮点: (1) 智能路径规划技术:多个内置高精度传感器与先进的 "路径规划 "算法协同工作,以 检测整个泳池的水下环境,然后快速、自主地规划出最高效、最有效的路径,确保每一 寸地板和墙壁表面区域都得到彻底清洁。与总是在池中随意行走的普通泳池清洁器相比, 清洁效率提高了 10 倍。
2) 出色的清洁效果:利用独特的运动控制算法,SMOROBOT 可以克服浮力、惯性和水 流的复杂影响,在任何角度、任何表面或任何方向实现精确指挥。凭借 SMOROBOT 边缘 清洁技术,Tank X 可以清洁任何形状的泳池,包括矩形泳池和不规则泳池。SMOROBOT 独特地使用了两个独立的过滤器,一个细网过滤器和一个粗网过滤器,既能捕捉树叶等 大颗粒垃圾,又能捕捉沙子、藻类、矿物质沉积物、灰尘、头发、虫子、砾石等超细颗 粒。 (3) 吸重物能力:强大的吸力甚至可以吸起石块等重物,通过水泵的 188w 吸力和电池输 出的 300w 瞬时最大吸力来实现这种强大的吸力。 (4) 先进的爬墙能力,多表面牵引力:由于 SMOROBOT 独特的吸力和坦克轮组合,即使 在光滑的表面上,它也能轻松爬上 90 度角。它可以清洁和攀爬各种材质的泳池,包括卵 石、石膏、混凝土等,并且不会磨损和损坏泳池内部材料。使用升级的特殊轨道设计, 避免泳池内部材料受到严重磨损。 (5) 四重安全保护:短路保护、过热保护、过充保护、过放保护。
3.1.5. XGO-Mini:拥有十二个关节的仿生四足机器人
XGO-Mini 作为一款人工智能四足机器人,具有 12 个自由关节,可实现全方位运动、六 维姿态控制、稳定姿态和多种动作,自带的传感器和 AI 模块专为教育、研究、算法验证和娱乐而设计。
XGO-Mini 设计亮点: (1) AI 传感器:关节位置传感器和电流传感器能够反映自身姿态和关节旋转角度及扭矩, 模仿狗行走的动作,并具有在不平坦的地形和极其粗糙的表面行走等优势。它甚至可以 通过调整高度来避开障碍物。 (2) AI 识别模块:Al 模块具有视觉识别、语音识别和手势识别功能,使 XGO-Mini 能够像 真狗一样进行面部检测、手势识别、和物体分析,听到、识别并回复用户。它还能追踪 多种颜色,识别 QR 码、April Tag 和 数据条码等。 (3) 应用程序互动:通过一键式设计和专属应用程序,可以与 XGO-Mini 轻松互动。有了 独特计算芯片,人工智能可以在本地系统上运行,无需互联网和手机即可控制。 (4) 内置最强大的边缘计算芯片 Kendryte K210 ,设计用于视觉和语义识别,广泛应用于 各种场景。它支持存储在 Micro SD 卡中的图像、音频、视频、机器学习模型和其他类型 的资料。
3.1.6. GoChess:真正的 AI 机器人棋盘
GoChess 是世界上首款融合人工智能技术的机器人棋盘,打破了地理位置的限制。目前, GoChess 正在申请一项新专利,自动移动棋子以反映对手的走棋。 同时,GoChess 也是一款配备先进 AI 模式和 32 个难度级别的国际象棋游戏,能够根据 玩家的技能水平提供挑战。它的自适应 AI 模式能够学习玩家的游戏风格并进行相应调整, 为玩家带来沉浸式和个性化的对弈体验。
GoChess 设计亮点: (1) 游戏自动设置:在 GoChess 棋盘内机器人可同时移动多个棋子,使设置过程自动、快 速、平稳、安静。可以选择设置任何难题或重置游戏状态。 (2) 智能灯光指导:利用彩色编码的教练灯,GoChess 可以分析游戏情况,并实时给出最 佳、最差或可能的走法。实时提示和反馈使不同水平、年龄的玩家能够享受并一起玩具 有挑战性的游戏。 (3) 远程对局:GoChess 集成了 Lichess 和 Chess.com 平台。通过内置的磁传感器和连接 来跟踪移动,玩家可以与世界各地的玩家远程下棋。 (4) 数字棋盘,专属 APP:由国际象棋大师创建的 GoChess 专用应用程序与现实生活棋盘 无缝同步,融合了在线和离线的游戏体验。连接流行的国际象棋平台,解决具有挑战性 的谜题,重温历史游戏,或在棋盘上实时直播比赛。该应用程序记录并跟踪玩家所有的 游戏和移动,提供实时分析和见解,帮助玩家磨练技能,实现进步。 GoChess 1XR 可以一次移动 1 个棋子(有一个机器人),而 GoChess 4XR 可以同时移动 4 个棋子(有四个机器人)。4 个机器人可以实现更高级的动作(比如捕捉、投掷等,这 需要同时进行两个动作),并将更快地为新游戏设置棋盘。
3.2. 智能生活新体验:探索消费电子的 AI 创新
3.2.1. Arsenal 2:智能相机助手
Arsenal 2 作为相机助手,利用人工智能和计算摄影技术,拥有相机全面的辅助功能,在 出货超过 100,000 台之后, 再次对数码单反相机和无反光镜相机的智能摄影助手进行了 重大改进。只需轻轻一点,Arsenal 2 的人工智能就能根据拍摄的场景确定最佳设置。
Arsenal 2 的智能助手 AI 会根据主题和环境建议设置。它使用先进的神经网络为任何场 景选择最佳设置(使用与自动驾驶汽车类似的算法)。 它的工作原理如下:Arsenal 2 迅速检查现场,使用图像识别来识别环境和特定主题的需 求(例如鸟类的快速快门或相机振动)。然后,Arsenal 2 使用卷积深度神经网络将当前 场景与数千张专业照片进行比较,找到最佳设置。最后,Arsenal 2 根据 22 个不同因素优 化设置,例如超焦距、传感器动态范围和镜头传输。 智能助手将根据使用的镜头和相机以及它们在不同情况下的表现来自定义设置。Arsenal 的加速计位于相机顶部,可以准确判断相机的稳定性。然后它可以选择完美的快门速度 以获得清晰的照片。 完全无线控制可在 100 英尺之外控制相机。点按即可对焦、更改设置、查看实时预览并 拍摄照片—所有这些都可以通过手机完成。
实时全景功能:Arsenal 2 使用全新改进的传感器,通过分析 22 种不同的环境因素,对相 机设置进行微调。从而为任何拍摄提供最佳设置。Arsenal 手机支架固定 Arsenal 2 和手 机,在拍摄过程中观看全景图的构建。 Arsenal 2 搭载 GPU(图像处理器),可使一些摄影工序自动化,例如:自动堆叠照片, 制成高动态范围(HDR)、长曝光、长景深(focus stacking),以及无人风景照等等。 特别值得一提的是实时全景相(Live Panorama)功能。透过加装手机支架(另购配件), 用家能边拍边看到全景照的合拼过程。全部经过处理的相片,可传送至手机保存,或直 接储存到 Arsenal 2 内置的 micro SD 卡插槽中。 Arsenal 2 在 Arsenal 1 基础上提升了 300-500%的性能速度,额外装备 micro SD 卡插槽, 配备景深、全景摄影、夜景辅助功能,支持超 100 多种流行的数码单反相机和无反光镜 相型号。
3.2.2. Vinci:人工智能驱动的智能耳机
Vinci 采用人工智能技术,是使用者的语音控制耳机和个人助理,具有智能降噪和身临其 境的 3D 音效。它可以通过语音控制,并由云技术提供动力,无需连接手机。Vinci 可感 知并学习使用者的身体状况、活动、听歌。
Vinci AI 是利用海量音乐资源中的数十万首原声带,通过深度学习技术学习歌曲的抽象表 征。声音将被提取为信号,经过预处理后输入神经网络。双向长短期记忆(Bi-LSTM)对 输入的顺序模式进行建模,而多层全连接神经网络(通常称为多层感知器)则实现了抽 象学习。用户档案是根据他们对推荐歌曲的行为(如 "喜欢 "或 "不喜欢")建立的。这些 数据会随着时间的推移不断积累,并以时间转换链的形式建模。根据学习到的统计数据, 相应地学习偏好。这样,Vinci 就能根据 "深度学习 "的用户-歌曲匹配,在决定下次推荐 什么或不推荐什么时变得更加智能。
3.2.3. Vinci 2.0 :独立式智能无线耳机
Vinci 2.0 是一款独立的语音辅助耳机,配备四核 ARM Cortex A-7 处理器、WiFi、3G 蜂窝 网和蓝牙连接。使用者可以要求 Vinci 拨打电话、发送短信、点歌、设置提醒事项或为使 用者指路,无需使用手机。 传导方式:Vinci 2.0 采用骨传导麦克风,即使在最嘈杂的环境中也能实现清晰的语音识别。 这项技术用于关键任务环境(军事、应急服务)的近场语音识别。环境噪声会被过滤掉, 只有说话者的声音会被收集和放大。
智能推荐:Vinci 2.0 的人工智能在两个层面上发挥作用。Vinci 从使用者的身体生命体征、 活动、听力习惯和偏好中感知和学习,从而做出智能、实时的推荐,不必自己选歌。 Vinci 从使用者的身体和活动数据中学习,选择与使用者的节奏、心率和听力偏好相匹配 的歌曲。从而做出智能音乐推荐。其次,它使用自然语言处理("NLP")算法来识别使用 者的话并理解使用者的意图。 Vinci 在深度学习技术的支持下学习歌曲的抽象表达。声音将被提取为信号,经过预处理 后输入神经网络。
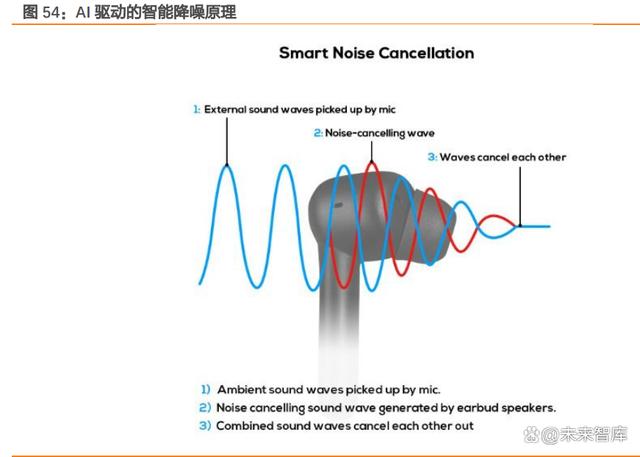
3.2.4. ReduxBuds:人工智能降噪真无线耳机
采用人工智能降噪技术和纳米石墨烯扬声器,智能过滤周围环境中的声音,在沉浸于音 乐的同时,还能享受对话、听到闹铃、了解交通状况,体验真正无线音频的未来。
ReduxBuds 核心优势
(1) 纳米石墨烯扬声器:石墨烯是一种碳的同素异形体,其强度是钢的 200 倍,厚度比纸 薄 1000 倍,这使其能够比传统线圈驱动器更有效地产生声波。(2) 长效续航:可提供长达两周的日常使用续航和足够的电量支持长途飞行,ReduxBuds 的低功耗、高效的石墨烯扬声器和大容量电池能实现 10 小时连续播放,加上充电盒可额 外提供 90 小时播放时间。 (3) AI 驱动的主动降噪(ANC):AI 自动调整播音强度,以省电超 50%,ReduxBuds 的 AI 可识别 6000 多种声音特征,并根据周围环境有选择性地过滤噪音,通过 30 分贝的消除技 术过滤。其效率可让使用者在激活状态下全天聆听(长达 8 小时),这比顶级品牌要长 2 倍。 (4) 透明度模式:透明度模式允许周围声音传入,确保安全并保持警觉,适用于骑车、慢 跑等不喜欢戴耳塞的人,让使用者能在任何环境下安全聆听音乐。(5) 双波束成形麦克风:手机放在 30 英尺以外的地方,也能享受清晰的通话和准确的语 音命令。
3.2.5. TOSY:配备 360 个超亮 LED 和运动追踪功能的智能飞盘
TOSY 是世界首款基于 AI 技术设计的智能飞盘。它具有 9 轴运动跟踪功能,使用不同的 传感器( 3 轴陀螺仪、3 轴加速计、3 轴指南针和 GPS )。飞行时,传感器会记录每次 投掷的数据,并借助 3D 仿真及分析技术,生成飞盘的飞行状态,帮助玩家思考如何更加 完美地投掷飞盘。
核心优势: (1) 配套的应用程序可对每条飞行路径进行 3D 模拟,然后计算和分析 TOSY 飞盘的飞行距 离、飞行时间、速度、旋转速度、俯仰角和飞行角度。 (2) 嵌入了 360 个超亮 LED。 (3) 有 6 个可调亮度级别和 6 种不同定时模式,以满足玩家的喜好和环境要求。 (4) 设有两种找回模式:在连接 app 的情况下,玩家可以通过配套的 app 找到飞盘的位置; 在没有连接 app 的情况下,如果飞盘保持静止超过 10 分钟,飞盘的灯光会自动闪烁,帮 助玩家找到飞盘。 (5) 重量只有 175 克。同时又保证了较好的耐用性,且 LED 灯的设计可以承受玩耍场景中 发生的强烈撞击。
3.2.6. VEZO 360:4K、 360˚ 智能车载摄像头
Vezo 360 是一款双镜头 4K 摄像头,可 360˚记录汽车周围的一切。内置 AI 可检测使用者 是否在驾驶过程中睡着,并提醒使用者保持清醒。加上 4G、Wi-Fi、蓝牙、GPS 和移动应 用程序,是智能仪表盘摄像头。 (1) AI 预防睡眠警报:内置了人工智能(AI)算法,扫描驾驶员的面部,及时识别出疲劳 或瞌睡的迹象,并发出警报,提醒驾驶者保持清醒。 (2) 智能安全防护和事故检测:全天候监控停放的汽车,并在检测到异常活动时发送通知, 提高了车辆的安全性。此外,保持明亮的 LED 灯可以有效威慑潜在的窃贼,为车辆提供 了额外的保护。同时还使用了加速度计和磁力计传感器,汽车摄像头能够检测到即使是 最小的事故。 (3) 高品质成像系统:使用高质量的双镜头组合,每个镜头拥有明亮的 f/2.0 光圈和 180 度宽视野,图像处理器采用 3D 降噪、多曝光 HDR 和背光补偿技术,捕捉每一个细节。 大型 1/2.3 英寸 CMOS 传感器确保在低光条件下也能提供高质量的成像。 (4) 安装设计:配备专门设计的支架,可以轻松调整角度和高度,适用于各种车型。此外, 磁性支架设计方便了 MicroSD 存储卡的更换,甚至可以将摄像头带到室外,用作动作摄 像机。循环录制可防止 MicroSD 存储卡上的数据丢失,而存储卡容量高达 256GB,可容 纳大量视频。
3.2.7. MemoryOS:由 2 次世界记忆力冠军共同开发的 AI 记忆力提升游戏
将行之有效的记忆技巧与最新的电子学习技术和身临其境的 3D 游戏相结合,Memory OS 创造出最有趣、最有效的学习记忆技巧和保持大脑活力的工具。记忆技巧需要为需要记忆 的信息建立一个结构化的存储空间(即 “心灵宫殿”)。心灵宫殿由 Loci 组成( Loci 可 以作为文件夹来编码、存储和检索特定的信息)。在想象中 “走 ”过心灵宫殿,可以将 创建的联想带入生活并引发即时回忆。
AI 驱动的电子教学组件支持: 使用最先进的 OpenAI‘s GPT-3 生成人工智能内容 ,将 OpenAI 的 GPT-3 和 DALL-E 应用到教育技术应用程序中,通过为课程、练习和实际使用创建高价值内容来加以利用。 DALL-E 是一个 120 亿参数版本的 GPT-3,经过训练后可根据文本描述生成图像。AI 将 文字转换成有些怪异的图像,让大脑对新奇的形式产生浓厚的兴趣。此外,利用定位法技 术能够轻松记忆任何所需的信息,真实和(或)想象事物的组合大大加快了视觉创作中的 联想速度。 相较于记忆力/认知能力提升游戏的优势。memoryOS 利用电子学习的最新进展,初始化 和放大大脑记忆大量各种信息的能力,让大脑自然而然地进行记忆。 “早期采用者 ”有 机会体验约 40 分钟的 memoryOS 演示,首次使用后即可在记忆效果和速度方面取得可衡 量的显著效果。
3.2.8. QOOLA Pro:改良型可穿戴式空调器
QOOLA Pro 是一款全新的空调,可以随身佩戴,帮助保持凉爽、降温或缓解疼痛。应用 场景包括沙滩、跑步、野营、攀岩、运输、劳动、旅游、烹饪。穿戴部位可以是背部、 腿部、腰部、胸部、手臂、肩膀、膝盖。
QOOLA Pro 核心优势有以下四点。 (1) 瞬时冷却系统:采用 ICS+ 冷却技术,ICS+ 以 QOOLA 1 上经过验证的 ICHS 为基础, 完全专注于冷却,这将冷却性能提高 20-30%。设备不需要隔绝加热产生的高温,可以使 用更多高导电材料。 (2) AI 温度控制原理:通过 App 使用 AI,利用用户模式提前预测温度变化,更快达到理 想温度。 (3) 缓解疼痛:QOOLA Pro 有冰凉的触感,但不会滴水,电池使用时间更长。同时也无需 提前冷冻,只需按一下按钮,30 秒内就能使其变冷。最大冷却选项可实现长时间、穿透 性冷却,以舒缓轻微的瘀伤。在最大冷却选项下,QOOLA Pro 在平均冷却周期内的冷却 效果可与冰袋媲美。 (4) 人体工程学设计:QOOLA Pro 的安装由松紧带固定,使用时可将振动降至最低。不使 用时,只需将其悬挂起来即可,无需将其挂在脖子上或放在专用盒中。
3.2.9. Relee M1:集成动作相机头盔
RELEE M1 是首款将摄像头、照明和语音命令操作集成到一个头盔中的头盔,采用 SONY STARVIS COMS™ 传感器,是世界上第一款集成动作相机的头盔。利用传感器芯片技术, 在弱光环境下可以精确捕捉目标。 M1 内置的 120°广角动作相机从只有 RELEE 头盔才能到达的地方拍摄到令人惊叹的 1080P FHD 镜头。 凭借强大的 SONY Starvis IMX CMOS 传感器芯片技术,RELEE M1 即使在昏暗的光线下 也能准确捕捉目标,并清晰地显示纹理和颜色。不再有模糊的图像!M1 每次都能可靠地 生成清晰的图像! 为了摆脱头顶上笨重的相机模块,Relee 开发了一种革命性的 DV 模块分离系统,该系统 允许镜头与处理器相距 25 厘米(通常视频数据传输的最大距离为 10 厘米)。 配备先进的电子图像稳定(EIS)技术,无论动作有多激烈,RELEE M1 都能提供极其流畅 的视频。 M1 旨在完全解放双手。通过智能蓝牙、头盔内立体声和防风麦克风连接到 iphone 或 Android 手机后,使用者可以自由接听电话、播放音乐或访问谷歌地图,完全免提且无忧。 Relee 采用耐用、轻质、透气的材料和空气动力学设计,让使用者在严肃的户外运动中更 快、更安全、更舒适。RELEE M1 嵌入了 18 个通风孔,位置巧妙,使空气流通,减少头盔 下的汗液积聚,让人在骑行时保持凉爽。
3.2.10. Dungeon Alchemist:用于桌面 RPG 游戏的人工智能地图绘制工具
Dungeon Alchemist 是一款由人工智能驱动的地图制作工具,只需选择一个主题,开始 绘制,Dungeon Alchemist 就能制作出高质量的地图,玩家可以打印、共享,或在喜欢 的虚拟桌面应用程序中使用。 Dungeon Alchemist 是一款独立的软件应用程序,适用于 Windows、Mac(包括 ARM)和 Linux,通过 Steam 平台发布。
Dungeon Alchemist 引用人工智能,参考波函数折叠算法完成定制。学习算法,程序化 生成地下城布局和房间。在初期,使用改进版的波函数折叠算法,从示例中推导出模式, 并根据这些模式建立新的房间。但这种算法并不适合制作逼真的房间。 新的设想是定制室内设计算法,利用人工智能进行构建,需要一个强大的地图编辑器来 制作它们。基本想法是,将为每种房间类型创建一组示例,人工智能将根据这些示例进 行学习。然后,系统将生成一组房间,并将根据质量对它们进行排名。人工智能将根据 这些新信息对示例分析,并收集了每个物体的 “行为 ”数据,利用这些信息来构建一个 平面图,使其尽可能地符合这些标准,同时还允许足够的随机性。这样就可以改进房间 的生成,而不必为每种房间类型制作数百个示例,最后根据合理的室内设计规则生成房 间。 不断进行的技术演变使 Dungeon Alchemist 成为玩家首选的桌面工具,拥有好的地图 是增强玩家沉浸感的最重要的事情之一。在未来,Dungeon Alchemist 将进行扩展算法, 使其也适用于室外环境,提高算法性能,使其运行更快,并为其他主题在示例中加入更 多对象。
3.3. 智能家居:科技打造舒适与便捷的未来生活
3.3.1. SPORTSMATE 5: 首款便携式可穿戴机器人外骨骼
这是世界上第一款,也是最轻的便携式可穿戴机器人外骨骼。基于人工智能的控制系统 和创新的基于扭矩的人工智能算法,它可以快速适应复杂环境。另外,用户使用时可切 换户外/健身模式:户外模式有助于减少疲劳,可有效增加用户户外距离,增加稳定性; 健身模式可提高用户健身效率。
工作原理: SPORTSMATE 5 有三个子系统:步态控制器系统(中央控制器)、执行器系统和能量系 统。在户外模式下,人的步态行为将被传感器检测到,并传至人工智能算法进行处理。 然后,控制器会向驱动器发送信号,以便电机为穿戴人提供适当的帮助。 核心功能: (1) 基于人工智能的控制系统:人工智能算法通过分析电机编码器的数据来检测穿戴者的 步态行为,为每一步提供精确的扭矩支持。SPORTSMATE 5 可根据步态检测用户的活动 (如远足、慢跑),并直观地调整上层算法。下层控制器接收该参考信息,并向电机驱 动器发送适当的信号。 (2) 可提供高达 18Nm 的扭矩:为了在锻炼时获得更多锻炼,只需轻按一下开关, Sportsmate 5 执行器就会提供协助,原本用于提供帮助的相同电机现在即可提供高达 10Nm 的阻力扭矩,使穿戴人的双腿获得更多阻力,起到更强的锻炼效果。 (3) 举重配件可快速拆卸,最多可协助举重 15 公斤:该装置能在举重过程中帮助挺直腰 背,降低背部受伤的风险。 穿戴后在举重和行走时,设备会根据创新算法“举重状态” 和“行走状态”持续提供帮助。 (4) 在健身模式下,电机可提供不同程度的阻力,以消耗更多卡路里。同时,智能能源系 统可以从人的运动中获取能量,并为电池充电,从而延长续航时间。
3.3.2. Hypershell: 适合日常探险的智能可穿戴设备
Hypershell 将最先进的机器人学、人体工程学和人工智能技术融入到极其紧凑的外形中, 通过十多个传感器检测人的微小运动与力学上的变化。结合扭矩、位置和力传感器来了 解使用者的运动情况。可提供有关下肢运动学和动力学的信息,并以毫秒为单位对运动 步态进行真实建模。
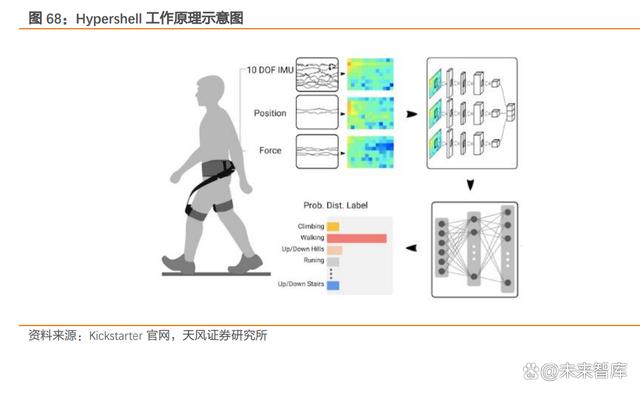
Hypershell 的大脑由两个功能强大的处理器组成,一个处理复杂的实时运动控制,另一 个则作为外部小脑,容纳专有的运动引擎。因此,Hypershell 可以模拟使用者的身体,并 对使用者的身体运动保持敏锐的感知。 与市场上使用 125W 马达的可穿戴外骨骼不同,Hypershell 使用了更强的马达来帮助进行 极限运动。M-One 电机是专为高性能可穿戴机器人开发的。它集成度高、重量轻、精度 高,能提供惊人的强劲动力。M-One 马达能够提供 1 马力和 32N-m 的扭矩。这一动力 相当于在一分钟内将三辆汽车(4400 千克)提升 1 米。 Hypershell 技术支持: MotionEngine 技术采用基于深度学习模型的 AAF(自动适应力) 算法来预测使用者的下一步行动。模拟技术和由 Human-in-the-Loop 生成的大量数据 训练使 MotionEngine 能够智能地处理各种复杂地形,让 Hypershell 主动学习并适应使用 者的运动习惯。 AI 运动引擎可适应九种以上的运动模式,包括步行、竞走、跑步、骑行、攀爬、上/下楼 梯、上/下坡、砾石路和自动支撑,每刻都可以轻松度过。
3.3.3. Ayi:可当家用私人 AI 助手的镜子
Ayi 是一款全新的人工智能驱动的家庭助手,帮助预定时间日程、关注健康、管理家用电 器等日常生活领域,配备自动化网络服务。使用者可以指示 Ayi 调整温度、开启照明、播 放音乐、设定提醒等,通过这一台设备实现多种功能。
Ayi AI 核心功能: (1) 人工智能驱动:开发人工智能驱动的智能镜子,分析用户的日程安排,并为更健康的 生活方式提供个性化建议。 (2) 机器学习技术:在智能镜子中实施机器学习技术,记录家庭各项控制指令,能够快速 适应用户需求并高效完成任务。 (3) 家庭设备中的语音识别:将先进的语音识别技术融入智能镜子中,实现免提控制,与 用户更流畅的交流沟通。 (4) 智能定制体验:虚拟软件构造定制虚拟装扮、家具等,体验无实物装扮。 (5) 显示器装备:配备具有防指纹处理的高清无边框触摸显示屏(三星(HD)显示屏、 1080p 高清摄像头、防印玻璃)。
3.3.4. Gymera:首个可移动、可玩耍的人工智能家用健身房
Gymera 通过将 AI 运用于家庭健身设备,搭配 4K 屏幕、摄像头、麦克风等硬件设备,构 造了首个可移动、可玩耍的人工智能家用健身房系统。
核心优势: (1) 个性化服务:Era 系统可以定位用户的骨骼标记,分析用户的身体姿势,并为用户制定个性化的训练计划。 Era 系统还能实时监测身体健康和体态。最新 Al 系统可以帮助用 户在受伤前预防受伤。它还会对骨骼结构、运动情况,甚至饮食习惯进行分析,从而全面 了解用户的健康需求。另外,Era 可以根据用户的饮食习惯、体脂、身高和体重来定制营 养计划,同时能够保证餐食口味。 (2) FunFitness(趣味健身):Gymera 以体感训练、3D 运动训练以及未来将会推出的 VR 游戏来缓解运动的无趣。 (3) Facetime 训练:Gymera 配备有摄像头和麦克风,可让用户和朋友在分隔两地的情况 下通过 Facetime 享受一起锻炼的乐趣。 (4) 家庭影院:Gymera 为使用者提供与 Tonal 相同的力量训练和 Mirror 所提供的有氧训 练,并配有一个 4K 屏幕,可作为家庭影院使用。 (5) 解放双手:Gymera 可以通过语音和手势控制,避免了运动后用带汗的手操作系统的 糟糕体验。启动和停止训练或调整重量都非常简单,无需停下来更改。 (6) 双教练示范:两名教练演示健身教练指导的训练和动作。一人做动作,另一人做示范。 易于学习和掌握正确的动作。只需看和听。 (7) 适合所有人的海量课程库:从瘦身、锻炼肌肉到减肥,Gymera 的健身课程由专家指 导,帮助使用者从锻炼中获得最大收益。
3.3.5. TEMPEST:革命性的个人天气系统
Tempest 拥有强大的技术,能准确预报具体天气情况,是第一款了解使用者所在地天气 的应用程序。它没有移动部件、几乎零维护、即时在线天气和预报数据的设计。 TEMPEST 应用场景:Tempest 数据既可以远程访问,也可以在本地网络上访问(即使在 互联网连接中断的情况下)。例如:1)将来自 Tempest 系统的气象观测和预报数据用于 智能家居;2)根据目前下雨情况或预计降雨量调整灌溉计划;3)当灯光亮度低于设定 值时,打开室外重点照明灯。
预报系统由 ECMWF(备受赞誉的欧洲全球预报模式)和 NOAA 的最佳预报模式初始化。 在关键区域,Weather Flow 的业务预报系统(WF WRF)将最有价值的观测数据同化到这 一强大的基线中,以提供详细的区域预报。然后,应用强大的机器学习技术(WF AI)对 模型输出进行后处理,提供比单独使用模型更准确的区域预报。为了个性化使用者的预 测,还使用了额外的人工智能。
3.3.6. Vi:首位真正的 AI 私人教练
Vi 是一个存在于生物传感耳机中的人工智能私人教练,为用户找到理想的健身之路,并 实时指导。Vi 的主要功能有三项,1)耳机设备:人体工学设计,全天电池寿命,哈曼/ 卡顿语音包;2)AI 私人训练:设定目标,量身定制计划,实时洞察,读取健身应用程序 数据;3)语音&文本交互:语音识别,用声音播放音乐,文本信息。 工作原理:Vi 通过各类传感器采集身体参数并监控活动状态,接着借助 AI 引擎,分析各 项数据,并通过机器学习,研究并根据用户身体状态完成各项功能的适应模式,最后将 数据以音频和文本的方式输出。
Vi 核心优势包括可全天佩戴、支持语音体验、拥有 AI 智能引擎、拥有训练优势、可以智 能处理信息。 (1) 全天佩戴:跟踪每天的身体活动,轻松接电话,听歌。 (2) 语音体验:在激烈的体育活动中过滤识别有用的语音。 (3) AI 引擎:实时训练,目标制定指导,设定训练计划,声音分析,Vi 语音库。 (4) 训练优势:全程指导,根据生理状况调整实时训练,更有效地燃烧脂肪,提高跑步技 巧,控制疲劳,防止受伤,达到目标理想心率区。 (5) 处理信息:输入和传感器能感知生理状况和环境,还能监测活动历史。Vi 强大的人工 智能大脑会分析其收集的丰富数据,学习和适应用户。Vi 能翻译声音和语音的用户体验 并发送短信。
3.3.7. Nitetronic Z6 智能止鼾枕头
Nietronic Z6 智能止鼾枕头可以很容易地适应使用者的睡眠习惯,而不会带来任何额外的 麻烦,同时创造一种放松、平静的睡眠体验。为了确保无论打鼾者的头在枕头上的哪个位 置,干预都有效,产品从一侧到另一侧放置了 6 个全尺寸的独立安全气囊。打鼾者将不 会有盲点来躲避产品的防打鼾系统。
Nietronic Z6 配备了 MEMS 传感器,这是一项专利技术,它可以在打鼾开始几秒钟后检测 打鼾声。枕头中的非接触式内置传感器可以准确识别头部位置,给气室充气,轻轻地将头 部转向侧面,停止打鼾。 除了通过应用程序进行设置之外,Z6 还提供了手动控制选项。这意味着用户在强光环境 下无需起身去操作手机。对于老年人或非智能手机用户而言,这种设计显得格外友好。
3.4. AI 推动生产力进步:引领智能制造及高效智能办公革命
3.4.1. AnkerMake M5:五倍快速色彩引擎 3D 快速打印机
AnkerMake M5 核心优势在于快速打印、印刷质量、处理器强大以及远程控制。 快速:借助 PowerBoost 的优化能源传动系统,AnkerMake M5 将实现高速精度,减少 70%的打印时间 (50mm/s → 250mm/s)。PowerBoost 使用强大的步进电机、双皮带传动轴 和稳定运动算法,为高速打印提供额外的动力。 印刷质量优秀:在 5X 速度下精确到 0.1mm 的细节。使用重新设计的 ultra-direct 挤出机, 使挤出机和喷嘴之间的距离缩短,误差减少,提高对最终精度的控制。 (1) 挤出:高速印刷的基础始于增强的多级齿轮系统,减速比为 9.37,输出 0.8N·m 的扭 矩。强烈的扭转作用给熔化室施加压力,使挤出速度更快。 (2) 熔化:60W 加热棒可迅速将喷嘴温度提高到 392°F(200°C),确保了灯丝在以 250mm/s 的速度打印时顺利放电,效率是其他打印机的 1.5 倍。 (3) 冷却:双冷却系统采用一对风扇,最大转速下输出的空气量是其他打印机的 1.3 倍, 这样可以避免串接,有助于快速冷却打印机。 处理能力强大:M5 配备了两个处理器,包括用于智能 3D 打印的 XBurst®CPU 和用于常 规处理的 Marlin CPU。凭借额外的动力,M5 可以追踪打印,确保打印出的模型和原本 的设计相匹配。AnkerMake 切片机在打印开始之前分析模型的 3D 数据,AI 识别系统使 用强大的 XBurst®CPU 在整个过程中不断进行检查和比较。 远程打印:通过 AnkerMake 应用程序、AnkerMakes 切片器、Alexa 或谷歌助手开始进行 打印。同时随时可以跟踪打印、暂停任务或修改设置。
3.4.2. Bambu Lab X1 :彩色大手办 3D 打印机
Bambu Lab X1 提供 20 m/s²加速,可打印色彩高达 16 色,配备 7 μm 激光雷达、PA / PC /碳素/支撑丝双 ABL、以及 Spaghetti Detection 核心技术。 (1) 色彩:Bambu Lab 的自动材料系统(AMS) 可以用来进行多种颜色和材料的自由打印。 Bambu Lab X1 可以使用可拆卸的支撑材料或可溶解的长丝来降低移除支撑的难度。X1 利 用先进的部件和复杂的热控制解锁更苛刻的材料,从而摆脱了对低温和易于打印 PLA 和 PETG 的依赖。 (2) AI 助力革新:Bambu Micro Lidar 将微米级精度带入 3D 打印。该系统可探测喷嘴高度, 校准流量,可以对固体的每一层进行深度测量。(3) 速度:用一台打印机代替多台打印机,并有相同的生产力。默认使用 0.1 mm 的层高。 更少的时间意味着更少的碳排放。(4) 平滑度:主动振动矫正+精确图层高度+高带宽流量控制=平滑度。 (5) 适用范围广:打印机、个人电脑、平板电脑和智能手机可通过云服务无缝连接。可以 从任何地方开始、控制和监控打印。本地网络打印和 SD 卡打印能实现离线打印。 (6) 环保打印:削减 80%碳足迹。在静音模式下仅有 50 分贝。节约 20%塑料。活性炭过滤 器吸收挥发性有机化合物。
3.4.3. PLAUD NOTE: ChatGPT 驱动的人工智能语音记录器
PLAUD NOTE 的核心优势在于它是使用集成 ChatGPT 的应用程序彻底改变效率,是全球 首款由 ChatGPT 提供支持的人工智能录音机,同时也是世界上第一款集成双拾音器引擎 的录音设备。此外,它还提供语音到文本的转录和支持 ChatGPT 的功能,包括自动摘要、 会议记录、待办事项列表和思维导图。 PLAUD NOTE 核心功能:1) 文本转写高效、准确,结合 OpenAI 的 Whisper STT 模型,实 现了 57 种语言高效、准确的文本转写服务,大大增强了自然语音到文本的转换过程。2) 高效整合信息,通过 ChatGPT 对转写文本进行处理,享受直观的结构化内容,以创建会 议记录、思维导图、待办事项列表和日记等,并根据使用者的需求量身定制,从而提高 日常工作效率。3)自动总结,利用应用程序的高效摘要功能,简化笔记记录并快速获得 见解。体验 ChatGPT 集成的强大功能,只需 5 秒即可完成工作。
3.4.4. OAK:模块化空间 AI 与高级计算机视觉系统
OAK 由 OAK API 软件和两种不同类型的硬件组成:OAK-1 和 OAK-D。它们都是小巧的 人工智能(AI)和计算机视觉(CV)动力源,除了两款机型共享的 4K/30 1200 万像素摄像头 外,OAK-D 还提供利用立体深度的空间 AI。一旦完成修补工作,OAK 的模块化的、 FCC/CE 认证的、开源的硬件生态系统可以直接集成到产品中。 OAK 的主要功能有:探测和跟踪,在线播放 4K H.265 @ 30FPS 视频,结合深度直播和 AI,简单训练神经网络。 OAK 将人工智能嵌入到真实的产品中:OAK 是一个模块化的、开源的生态系统,由 MIT 许可的硬件、软件和人工智能训练组成。它让空间人工智能的超强能力和加速的计算机 视觉功能嵌入到产品中。OAK 提供了一个单一的、内聚的解决方案,否则就需要将不同 的硬件和软件组件拼凑在一起。 简单的 30 秒设置:OAK API 是空间人工智能入门的最快方式,特别是 OAK-1 模块的单 个 USB-C 连接器为其提供数据和电源,可以在一分钟内从打开硬件到运行高级图像分类 器。 使用或创建免费的神经网络:物品识别,人脸识别,车辆识别,路人识别,姿态估计, 文本识别,语义分割。 OAK-1&OAK-D 共同特点包括神经推理,对象跟踪,H.264 和 H.265 编码(HEVC, 1080P&4K 视频),JPEG 编码,鱼眼镜头,APRILTAGS(视觉基准系统),特征跟踪,运 动估计,边缘检测。OAK-1 独有特点是自动基于运动的无损变焦:12 倍无损变焦,输出 720p, 6 倍无损变焦,输出 1080p, 1.5 倍无损变焦,输出 4k。OAK-D 独有特点是立体深 度(含中值滤波)、三维物体定位、三维空间中的目标跟踪。
3.4.5. LumiTool F20:采用 AI 设计的 20W 光纤激光雕刻机和切割机
兼备速度、精度及深度的金属雕刻仪器,结合智能图像规划技术,提供强大的图像设计、 精确的矢量和位图编辑,以及灵活的文本和自由图形工具,随时随地轻松雕刻自己的独 特设计。
核心优势: (1) 人工智能图形设计:由 ChatGPT 和 MidJourney 结合提供自主设计功能,只需想象想 要的图像,将其输入,然后让应用程序内的 Midjourney 助手生成用户想要的设计。另外, 通过访问 LumiCloud 图库,可以轻松上传和共享文件,将照片变成可雕刻的艺术品。此 外,通过应用程序到设备的无线连接,可以随时随地雕刻自己的独特设计。(2) F20 采用光纤激光源,性能超越普通二极管、CO2 和红外激光器,具有无与伦比的精 度、速度和耐用性。能在金属和硬塑料等高难度材料上雕刻出复杂精美的设计。F20 的雕 刻速度为 7000 毫米/秒,可显着提高制作效率,为单个或批量项目提供节省时间的解决 方案,并为 iOS 和 Android 用户提供更快、更精细的矢量和位图图形雕刻体验。 (3) 配备强大的激光控制系统,可确保激光束精确移动,蚀刻精度高达 0.001 毫米,呈现 出最精细的细节。
(本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
精选报告来源:【未来智库】。