
图一、机器人定义
机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或危险的工作。
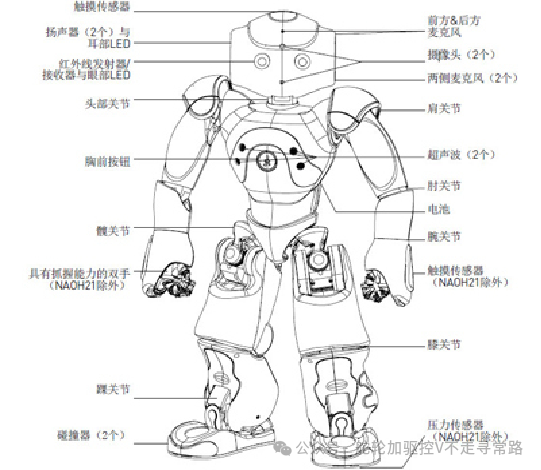
图1:机器人的一般结构图
联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。”
机器人整机基本上由两部分组成,即机器人本体和控制装置。机器人的本体包括:机座、驱动器和驱动单元、手臂、手腕、末端执行器(操作机构)、移动机构,以及安装在机器人本体上的感知器(传感器)等。控制装置一般包括计算机控制系统、伺服驱动系统、电源装置,以及人机交互设备(如键盘、显示器、示教盒、操作杆)等。
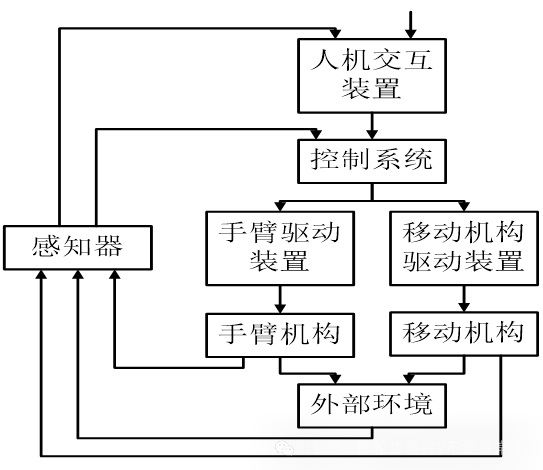
图2:机器人的一般结构框图
二、工业机器人定义及组成
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。多用于搬运材料、工件或操持工件以完成各种作业,它可以是固定式或移动式。
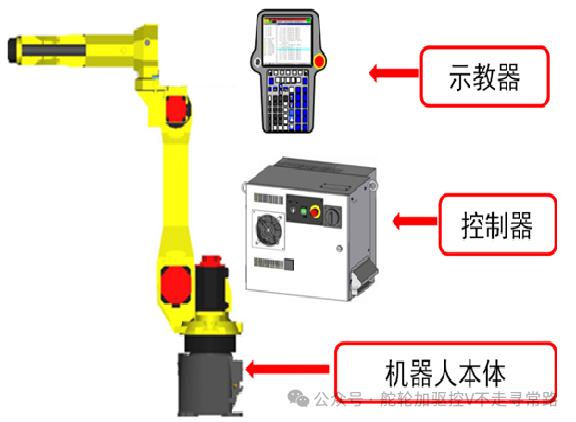
图3:工业机器人组成
工业机器人的控制功能和结构特点以及自主能力各有差异,但必须具备三个基本要求:采用以CPU为核心的控制器进行控制,如工业控制计算机、NC控制器、PLC等;能按输入指令进行记忆和再现;能独立按给定指令在三维空间内进行操作。基础的组成部分如下:
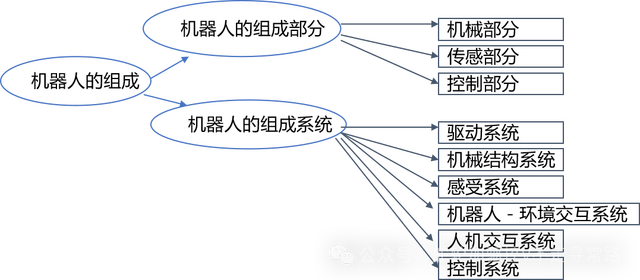
图4:工业机器人系统
在机器人的六个组成系统中,其运行逻辑关系如下:
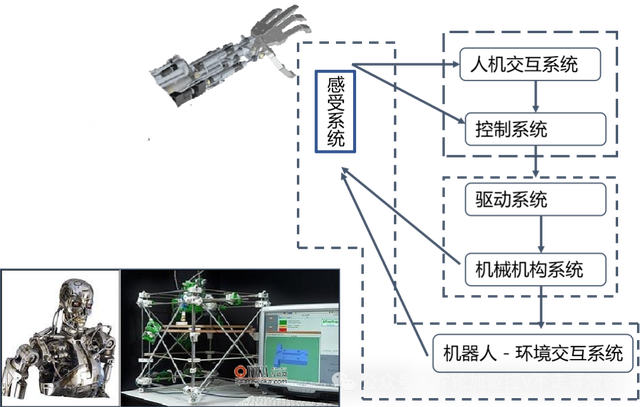
图5:工业机器人组成各系统运行关系
三、工业机器人结构
工业机器人主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度。
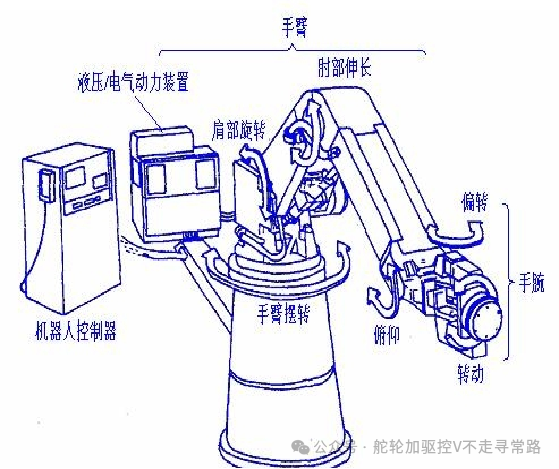
图6:工业机器人的典型结构图
其中驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制,机器人的每个关节均采用一个交流伺服马达驱动。
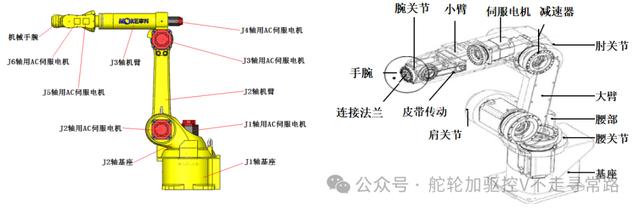
图7:工业机器人关节驱动执行机构
各关节处减速器主要有谐波减速器和RV减速器两类,其中RV减速器具有承载能力强、精度高的优点,因此机器人的基本轴(J1J2J3)一般采用RV减速器传动,谐波减速器体积小、重量轻,通常用在腕部轴(J4J5J6)。
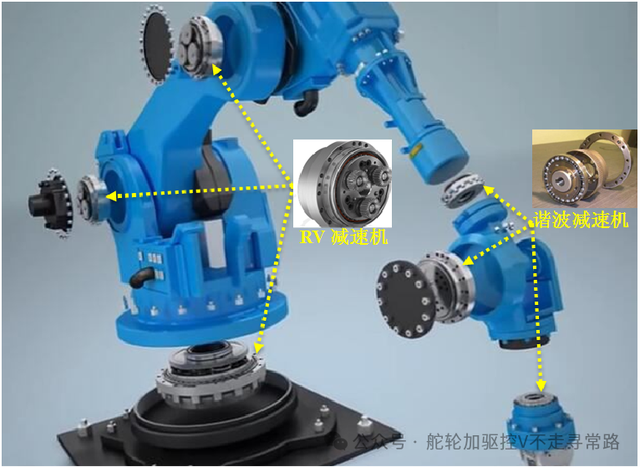
图8:减速器安装示意图
机器人执行器最后一个轴的机械接口通常为连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
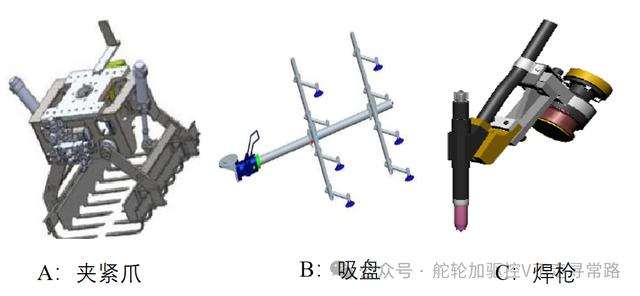
图9:工业机器人的末端执行机构
按工业机器人末端执行机构手指数目分类,可分为二指、三指和多指手爪,手爪还可以根据手指关节继续细分。
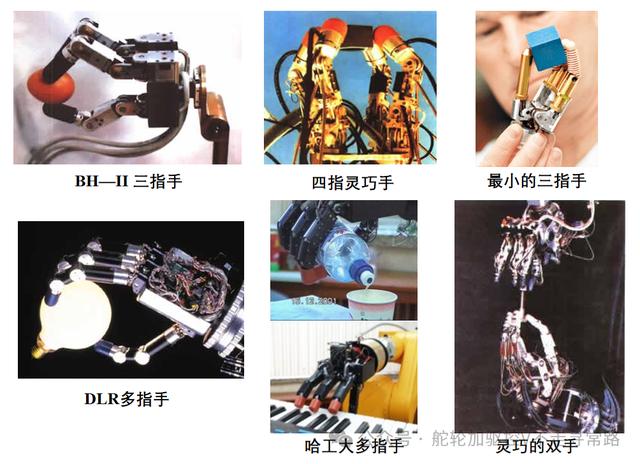
图10:机械手爪
四、工业机器人工作站
机器人工作站是指以一台或多台机器人为主,配以相应的周边设备,如变位机、输送机、工装夹具等,或借助人工的辅助操作一起完成相对独立的一种作业或工序的一组设备组合,也可称为机器人工作单元。
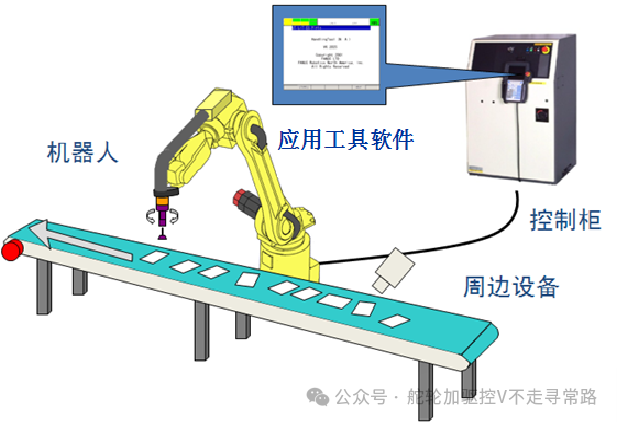
图11:工业机器人工作站
一般的工作站的组成主要由机器人、机器人末端执行器、夹具和变位器、配套及安全装置、动力源、工作对象的储运设备、控制系统等部分组成,不同功能的工作站,末端执行器和工作对象的储运设备等会有所不同。
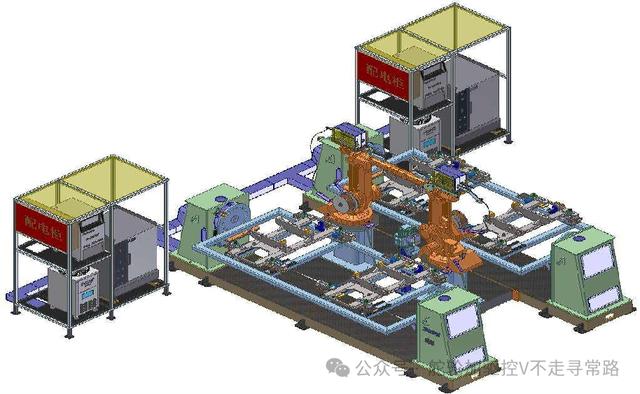
图12:焊接机器人工作站
五、工业机器人的典型应用
1. 工业机器人在冲压生产线中的应用
在冲压自动化生产线中,最主要的部分就是其工件的自动搬运系统, 包括工件的上料、冲压机之间工件的传送、工件码垛三个部分,而完成此三项任务的主要工具就是冲压线上下料机器人。

图13:冲压机器人工作站
2. 喷涂机器人的应用
与其他用途的工业机器人相比,喷涂机器人在使用环境和动作要求上有如下的特点:
1) 工作环境包含易爆的喷涂剂蒸汽;
2) 沿轨迹高速运动, 途经各点均为作业点,属于轨迹控制;
3) 多数机器人和被喷涂件都搭载在传送带上,边移动边喷涂, 所以它要具备一些特殊性能。

图14:喷涂机器人
3. 码垛机器人应用
机器人码垛机富有柔性,被广泛用于码垛作业中,机器人技术在码垛领域中的应用,主要表现在以下几个方面:
1) 适应性强。机器人码垛搬运时只要更换不同抓手就能够处理不同种类的产品;
2) 智能程度高。码垛搬运机器人可以根据设定的信息对到来的货物进行识别, 然后将货物送往不同的托盘上;
3) 操作范围大。码垛搬运机器人本身占地面积很小, 工作空间大, 并且可同时处理多条生产线上的产品;
4) 适应各种工作环境。机器人码垛搬运可以代替人工码垛搬运,避免粉尘、有毒等工作环境对人体的危害。

图15:码垛机器人
4. 焊接机器人应用
焊接机器人是提高工作效率、焊接质量以及改善工人工作环境的重要工具,所以它在现代焊接行业发挥着越来越重要的作用,应用也越来越广泛。

图16:焊接机器人
5. 抛光打磨机器人应用
抛光打磨机器人针对轮毂打磨、洁具行业水龙头等抛光打磨工艺,实现抛光打磨工艺的自动化,降低打磨工艺带来的粉尘污染对工人身体健康的危害, 协助企业降低人力成本,提高并稳定抛磨质量。

图17:抛光打磨机器人
6. 雕刻机器人应用
雕刻机器人对工艺品的加工可分成三个步骤:①直接记录艺术家的加工数据, 或者测量工艺品的模型数据;②根据所获得的数据生成和修改模型, 把模型数据转变成加工数据;③按照所获得的加工数据加工工艺品。

图18:雕刻机器人
7. 装配机器人应用
根据十几个主要机器人使用国家的统计数据,用于装配作业的机器人在机器人种类中占34.5%,并且用于装配的机器人仍然以最快的速度增长。装配机器人广泛应用于电子业、机械制造业、汽车工业等。
机器人自动装配过程规划涉及产品设计、安装工艺、专用机器设备、机器人及人工的最佳匹配、通用工装夹具、运输系统的协调工作等。

图19:装配机器人在汽车产线的应用
六、总结
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件 —— 伺服电机、减速器和控制系统,相当于机器人的“大脑”)、中游机器人本体(机器人的“身体”)和下游系统集成商(国内 95% 的企业都集中在这个环节上)三个层面。
中国机器人产业由于先天因素,在单体与核心零部件仍然落后于欧、美、日、韩等国家。经过近年大力发展,中国机器人形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
江苏亿控智能装备有限公司作为国内知名的工业机器人动力及控制系统方案提供商,公司生产的直流、交流、同步伺服等驱动器规格型号齐全、功能全面,具有高精度、高稳定性等优点,可应用于高端装备业、工程机械、智能生产、大型仓库、港口等行业的自动生产、自动仓储和自动物流操作中的工业机器人等设备上。












